



| 技術名稱 | 在非可視直線傳輸環境中之無人機無線感測技術 | ||
|---|---|---|---|
| 計畫單位 | 國立中央大學 | ||
| 計畫主持人 | 陳昱嘉 | ||
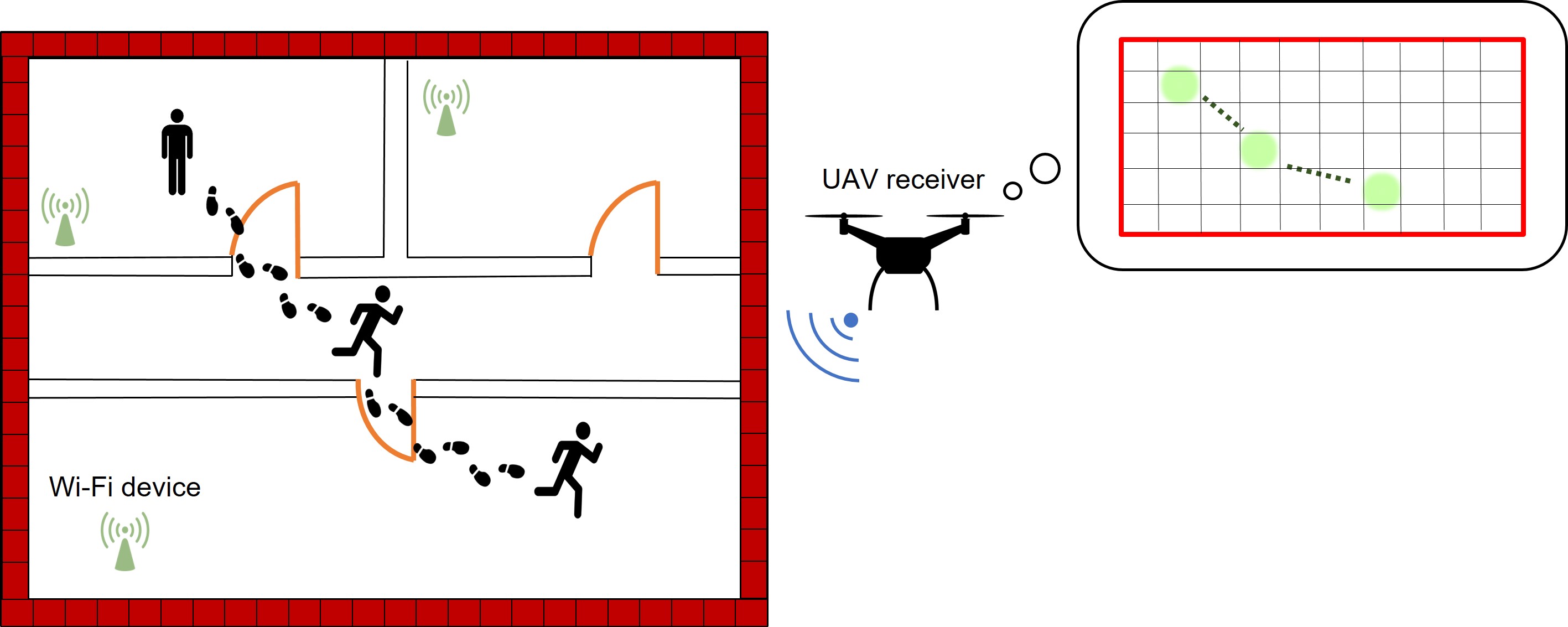
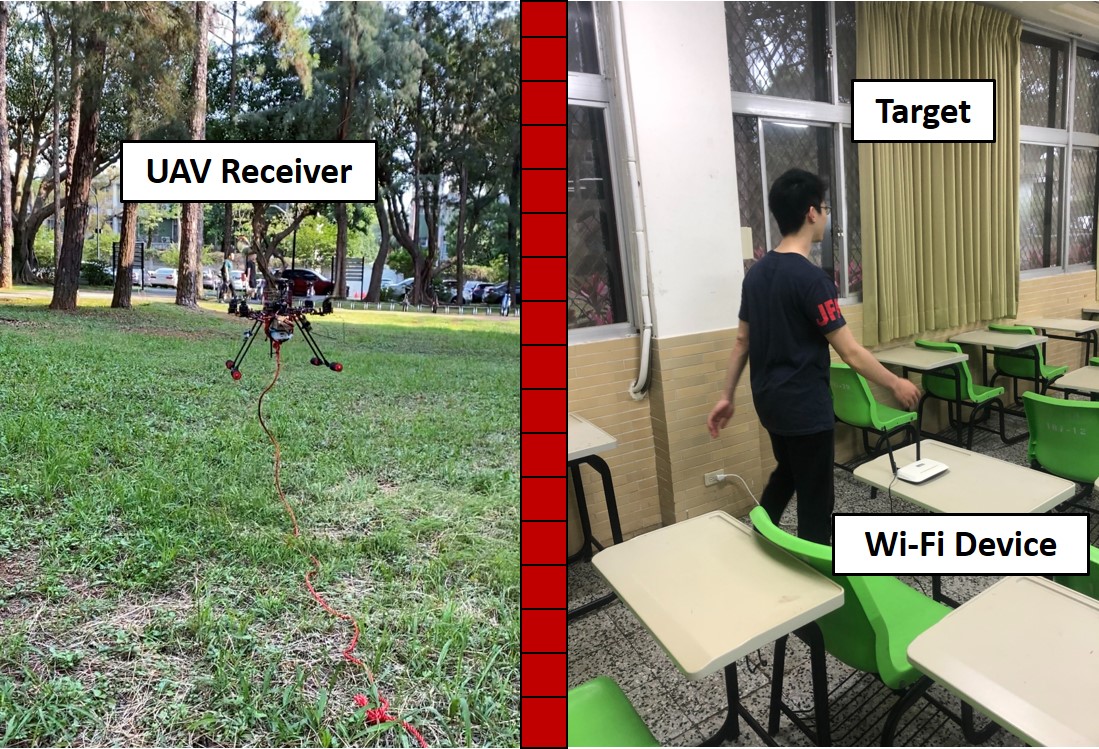
| 技術簡介 | 由於無人機飛行時會產生自體晃動,導致較精細的測量受到影響,因此如何降低自體震動所造成訊號擾動之影響,是無人機無線感測技術的重大挑戰。本系統結合生成對抗網路(Generative Adversarial Network, GAN)與降噪自動編碼(Denoising Autoencoder, DAE)設計無人機自體震動訊號濾除方法,GAN與DAE已被證實能消除雜訊干擾的影響,並有效的提升辨識效果,然而過去的研究多著重在圖像或語音訊號處理。我們透過固定接收端與無人機接收端分別得到乾淨的訊號(Ground-truth Signal)和真實環境的雜訊(Real-world Noisy Signal),透過此方法可以預先訓練模型,就算無人機於未知的環境中,也可以獲得穩定且顯著的消噪效果,最終透過深度學習分類演算法驗證其效能。在實作中我們考慮了一種非接觸式的人體感知場景,通過無人機掃描室內Wi-Fi訊號強度,分析環境中各個位置與無線訊號之關係,並徵描繪出室內無線電波圖,最後透過分辨無線電波圖之訊號特徵變化進行人體移動檢測。 |
||
| 科學突破性 | 結合無人載具與網路通訊是近年來重要的研究趨勢,世界各國的產業界、學術界以及政府部門都在發展或規範未來無人機之相關技術與法案。我們透過無人機將原有2D平面之人體無線感測技術發展至3D空中感測,並進行初步之驗證,使無線感測技術可以應用於原來2D無法應用之惡劣環境,如救災現場、多遮蔽物之環境中。 |
||
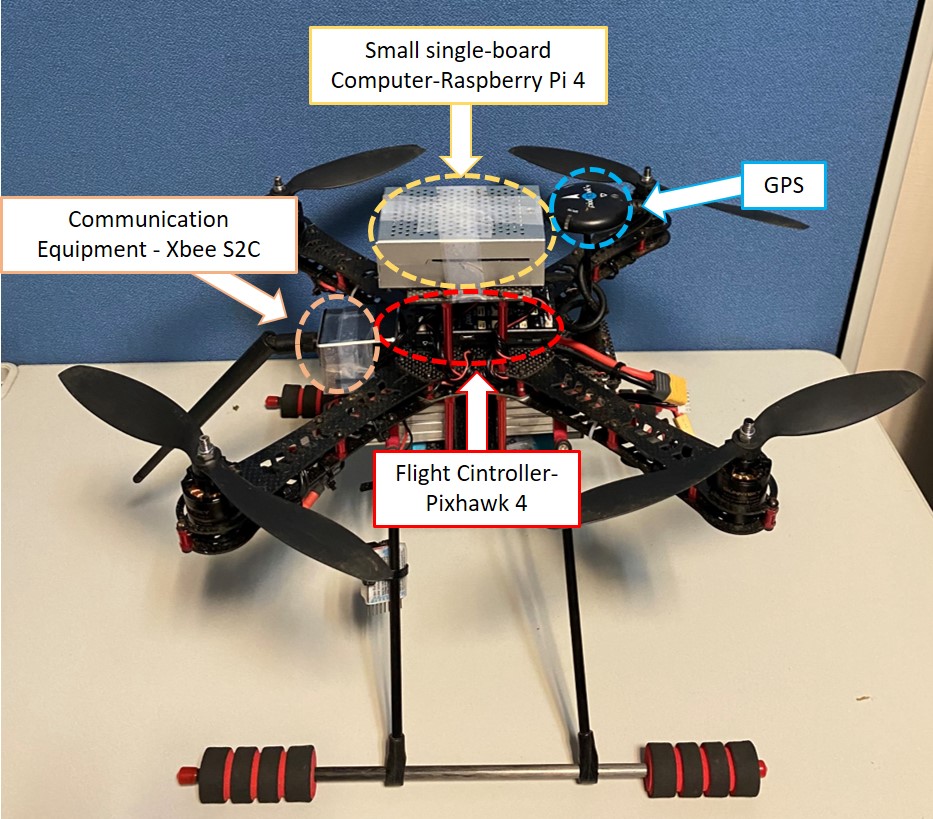
| 產業應用性 | 所開發之飛行機器人無線感測技術可以運用於警消救災或軍事等關鍵任務中,透過人機協同合作,實現精準有效的智慧救災與智慧安防的願景,未來將設計基於開放架構與開放源碼的全可程式化無人機系統,結合無線感測、飛行控制與無線通訊技術,可望成為我國自主無人飛行機研究之基礎建設的重大突破。 |
||
| 關鍵字 | 無人機 無線感測 人機協同 人體感知 人體定位 物聯網 高可靠傳輸 定位與追蹤 智慧都市 智慧救災 | ||
- 聯絡人
- 陳維
- 電子信箱
- wingray21@gmail.com

