



| 技術名稱 | 無人機資料收集之飛行軌跡設計 | ||
|---|---|---|---|
| 計畫單位 | 國立清華大學 | ||
| 計畫主持人 | 洪樂文 | ||
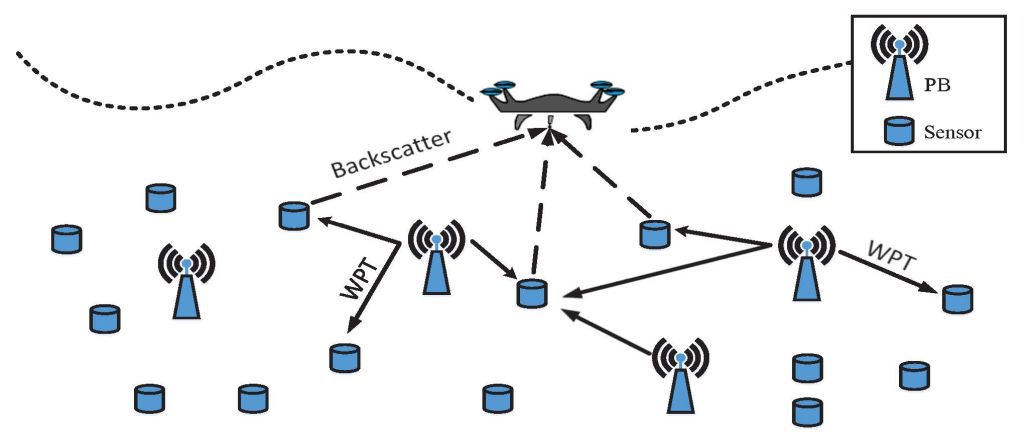
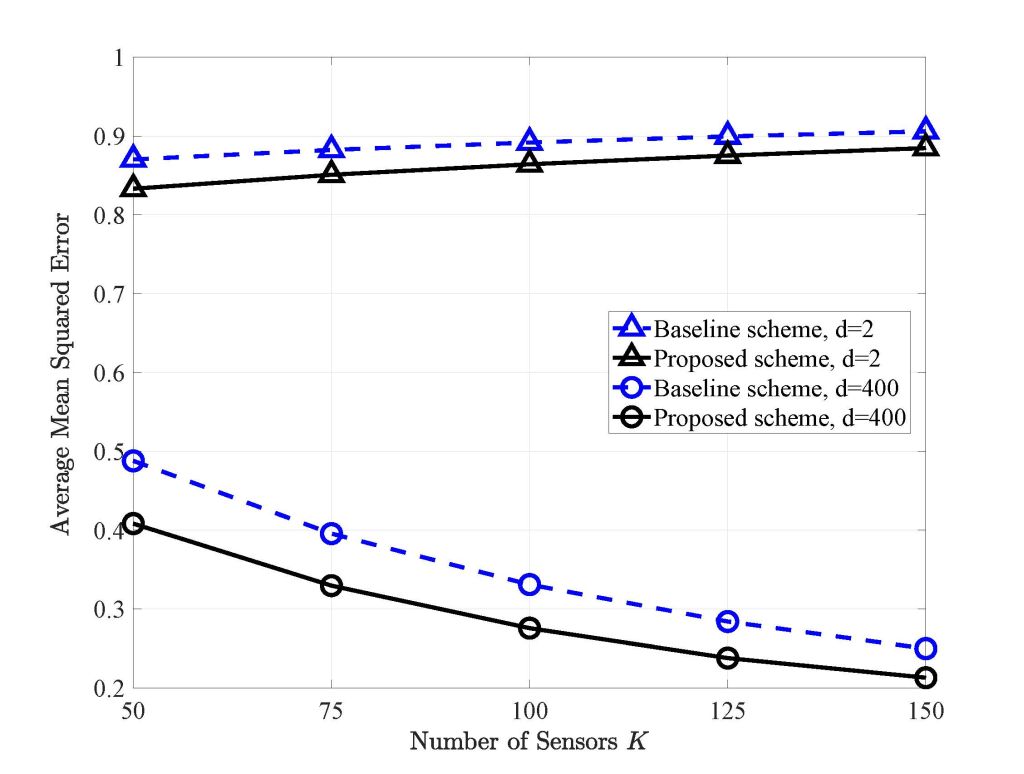
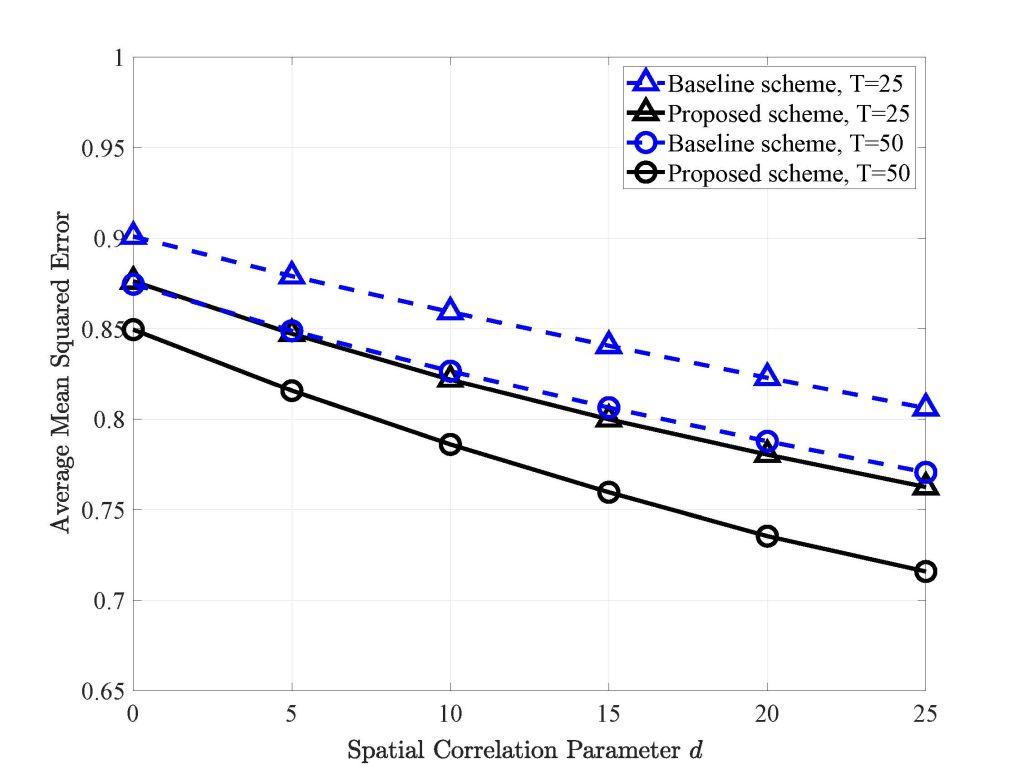
| 技術簡介 | 我們主要探討如何有效利用無人機收集無線感測器資料。提出之技術將設計無人機之飛行軌跡,來提升有限延遲要求下的資料收集品質。主要考量佈建於地面上使用backscatter通訊的感測器環境,以最小化訊號估計之均方誤差為目標,透過交替更新無人機飛行軌跡及感測器傳輸排程,得到有限延遲情況下的最佳飛行軌跡。 |
||
| 科學突破性 | 使用無人機作為資料收集中心,可更有彈性地調整其飛行軌跡,減低障礙物阻隔可能性,進而提升資料接收效果。此技術主要考量在具有延遲時間限制,多個感測器需同時傳送因而互相干擾的情境,設計無人機飛行軌跡以確保資料收集品質。此外使用能量基站和backscatter通訊技術進行資料傳輸,可有效減低感測器能量消耗以延長其使用期限。 |
||
| 產業應用性 | 此技術可特別應用於偏遠地帶或地形複雜之資料收集情境。如佈建於山林或城市建築物上的感測器資料收集。使用無人機可於遠端進行控制,有效減低地形干擾和限制,提升收集效率。此外透過使用backscatter通訊技術,可有效降低感測器之能量消耗,延長使用期限。所提出之飛行軌跡設計及感測器排程可有效提升資料重建效果。 |
||
| 關鍵字 | 無人機 資料收集 飛行軌跡設計 無線能量傳輸 能量基站 資料重建 無線感測網路 最小化均方誤差 資料相關性 傳輸排程 | ||
- 聯絡人
- 洪樂文
- 電子信箱
- ywhong@ee.nthu.edu.tw
其他人也看了