





| 技術名稱 | 無人機即時辨識荔枝椿象防治技術 | ||
|---|---|---|---|
| 計畫單位 | 行政院農業委員會臺南區農業改良場 | ||
| 計畫主持人 | 鄭榮瑞 | ||
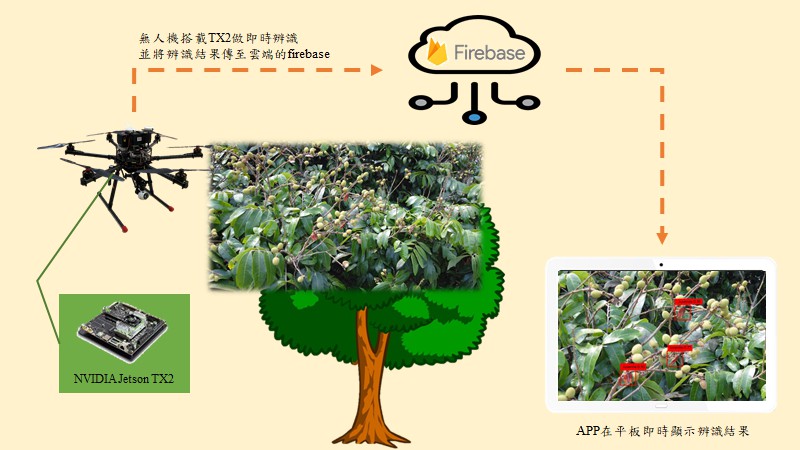
| 技術簡介 | 本團隊已發展出一套荔枝椿象防治策略,成功運用植保機於荔枝椿象若蟲發生期進行防治,可達9成以上防治率。荔枝椿象即時影像辨識,係基於YOLO系列 人工智慧演算法,以手機拍攝荔枝椿象,先前計畫結果顯示辨識準確率高於70%。透過建置APP以深度學習即時判識荔枝椿象與發生位置來結合溫度、濕度、日照等環境感測器蒐集氣象資料,以無線傳輸數據儲存雲端資料庫進行分析,即時掌握荔枝椿象好發區,整合RTK、RS與GIS 技術,建立3D 農噴路徑,使植保機主動針對地形變化做飛行上調整。技術精進在於荔枝椿象防治藥劑劑量減量,並於植保機裝載更適合於坡地噴灑之噴頭,同時以無人機進行拍攝,找出荔枝椿象發生處,進行目標點噴藥,達到精準用藥目標。 |
||
| 科學突破性 | 本技術整合農業、工程等學研單位,整合即時影像辨識、環境感測等物聯網功能並建立無人機辨識荔枝椿象發生系統,導入智慧化路徑規劃,提升無人載具防治效率,達到精準用藥之防治目標。 |
||
| 產業應用性 | 本技術建立一套完整荔枝椿象防治策略,透過無人機即時辨識荔枝樁象好發位置與危害程度,規劃荔枝椿象防治噴藥區域,利用無人植保機搭載適當農藥劑量並配合陶瓷空心圓錐噴頭,精準控壓及航線規劃系統,能應用於坡地果樹場域,作為農藥代噴業者於坡地果樹上防治荔枝椿象標準,提高整體防治效益,也解決無人管理果園噴藥難題。 |
||
| 關鍵字 | 無人植保機 坡地果樹 荔枝椿象 病蟲害防治 智慧農業 即時影像辨識 深度學習 YOLOv3 路徑規劃 霧化粒徑 | ||
- 聯絡人
- 陳盈丞
- 電子信箱
- cychen@mail.tndais.gov.tw
其他人也看了