





| Technical Name | 人工智慧機器人應用於植物醫學之研究-以甜椒為例 | ||
|---|---|---|---|
| Project Operator | National Chiayi University | ||
| Project Host | 艾群 | ||
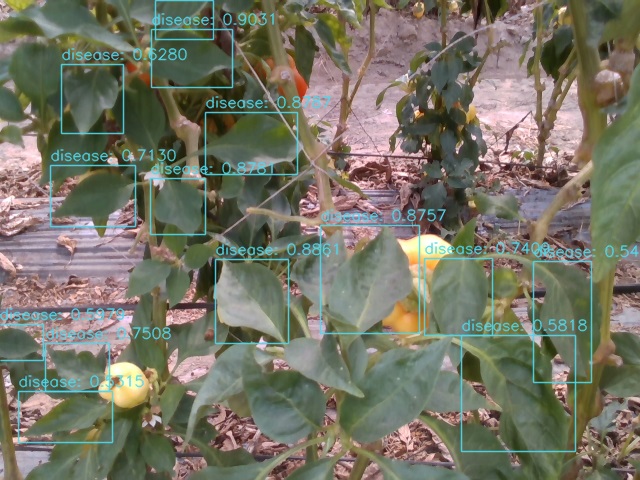
| Summary | The sweet pepper cultivationplant protection robot developed includes three parts: the intelligent image identificationpositioning system of sweet pepper diseasesinsect pests is composed of YOLO4 deep learning modelimage 3D vision integration. It can perform disease detectionspatial positioning,guide the robotic arm spraying device to accurately spray the diseased. The automatic walking system can use GPS to plan the movement path of the plant protection robot in the field, search for plants infected with pestsdiseases,perform the tasks of pest control. |
||
| Scientific Breakthrough | This technology establishes a database for the identification of pestsdiseases of sweet pepper with planar imagesstereo vision. In addition to the digital image data of the main hazards of the pests, it further establishes the early to late grade data of the hazards of the pests. The research results can be used for similar crops in the future. It is not only limited to the identification of pestsdiseases of sweet peppers. |
||
| Industrial Applicability | This project developed a multi-kernel sweet pepper diseasepest image identification system, using deep learning such as Faster R-CNNYOLOv4 to identify plant pathology with different networks. The image database of sweet pepper pest symptoms contains the clearsevere symptoms further establish the symptom severity from early to severe. The established database can be applied to the developed technology, but also to the general identification of sweet pepper pest,assist in pest diagnosis on plant medicine. |
||
| Matching Needs | 天使投資人、策略合作夥伴 |
||
| Keyword | Plant protection robot image identification artificial intelligence deep learning sweet pepper pest and disease control Crawler-type unmanned self-propelled vehicle GPS path planning | ||
- wlo2685583@gmail.com
other people also saw