



| 技術名稱 | 自主巡航水下無人載具 | ||
|---|---|---|---|
| 計畫單位 | 國立中山大學 | ||
| 計畫主持人 | 王朝欽 | ||
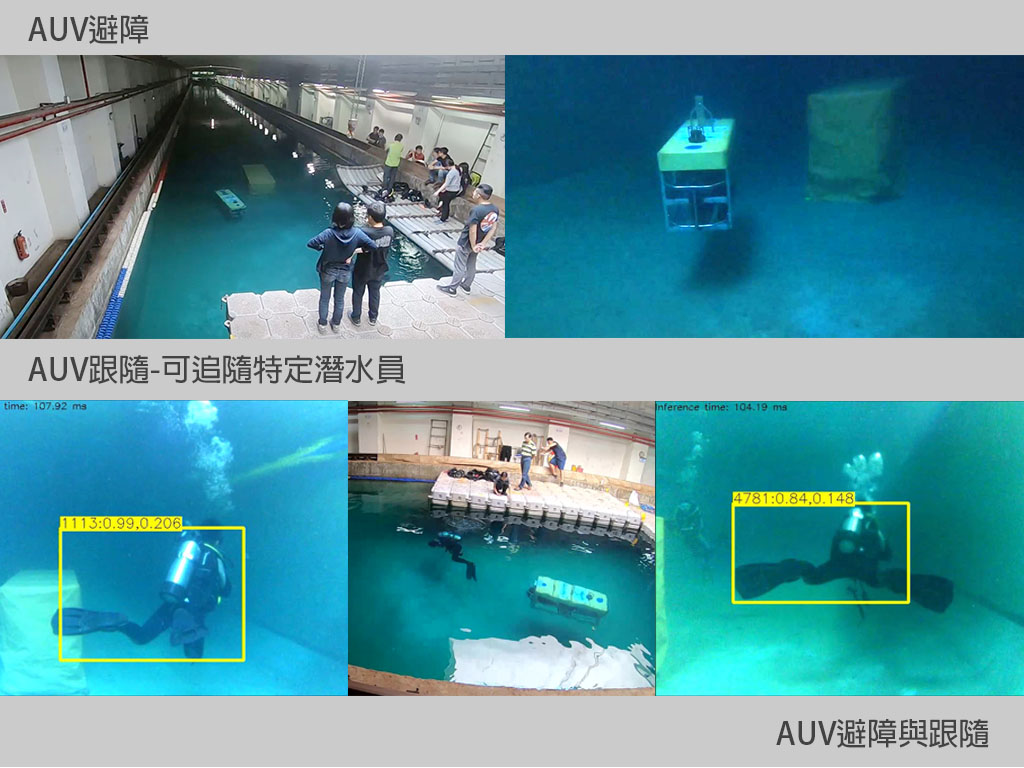
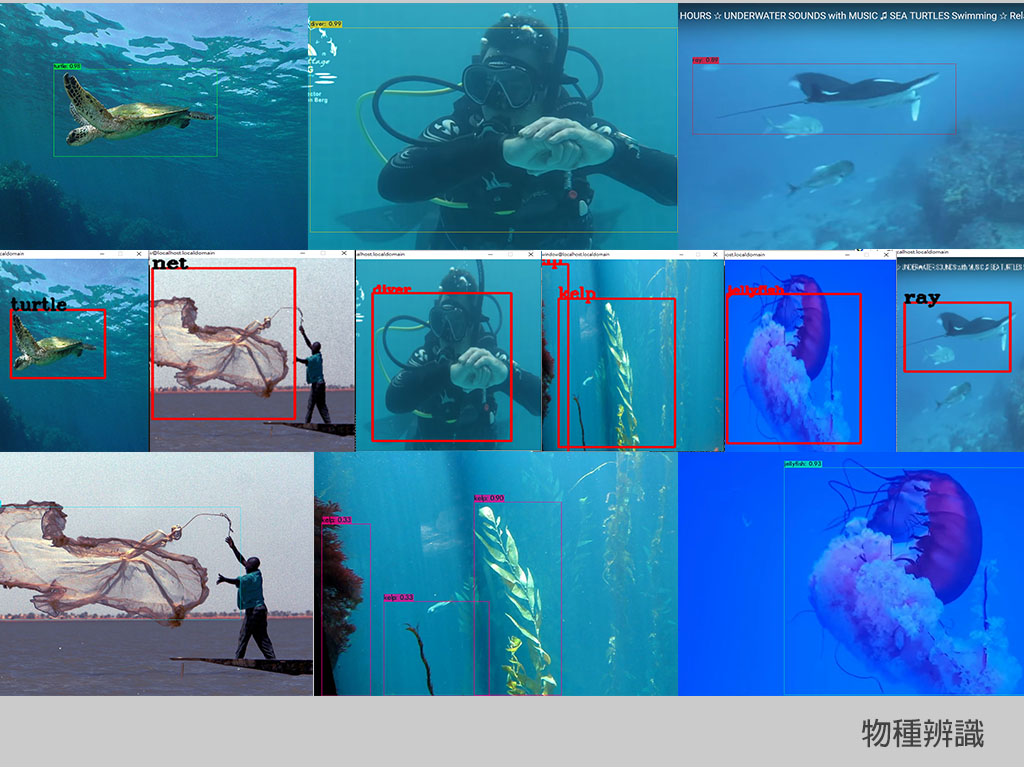
| 技術簡介 | 本水下無人載具包括3D建模之水下資料庫建立、電池電源監控技術與無線電力傳輸、水下無人載具避障、導航及跟隨控制技術、GPS水下定位、人工智慧聲納海床底質分析技術、水下物件偵測網路、陸上及水下影像除霧網路、水下影像色彩還原網路、水下物種細部分類網路、水下光學特徵演算法以及LED智慧光色補償照明技術。 |
||
| 技術影片 |
|
||
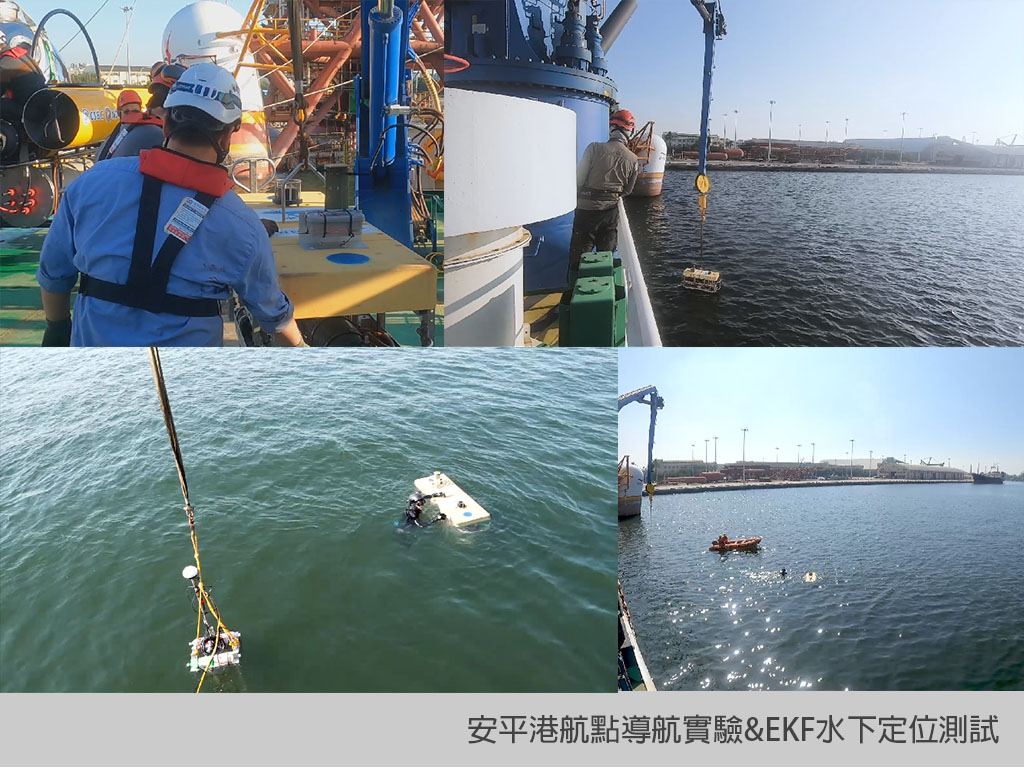
| 科學突破性 | "1. 水下物件偵測網路、陸上影像除霧網路、水下影像除霧網路、水下影像色彩還原網路、水下物種細部分類網路,多項指標皆超越國際標竿 2. AUV水下導航與定位,定高/定深誤差平均0.1 m,定艏向誤差≤5 deg 3. 自動雙向偵測電流技術,最大誤差0.7,最大電壓範圍20V,電流+/-3A" |
||
| 產業應用性 | "1. 資源探勘:海底生態、生物與污染調查、水下養殖採收與觀察、海底資源與礦物探勘、水下考古調查、海底地形重建 2. 民生產業:離岸風場底質大規模探測、海底電纜與管線之檢測、水下目標物定位與救援、水下環境監測 3. 軍事國防:軍事水下目標物偵搜、潛水員監控與追蹤、港埠安全監防、敵船或不明船隻跟蹤" |
||
| 媒合需求 | 天使投資人、策略合作夥伴 |
||
| 關鍵字 | 無人水下載具 人工智慧 3D建模 水下影像強化 水下影像除霧 水下定位與避障 水下物件辨識 水下物件追蹤 電池系統監控 高效率電能轉換 | ||
- 聯絡人
- 吳昕哲
- 電子信箱
- ghjkwu93155@gmail.com








