



| 技術名稱 | 自主式水下無人載具光學與聲學系統之創新技術開發 | ||
|---|---|---|---|
| 計畫單位 | 國立成功大學 | ||
| 計畫主持人 | 林宇銜 Lin, Yu-Hsien | ||
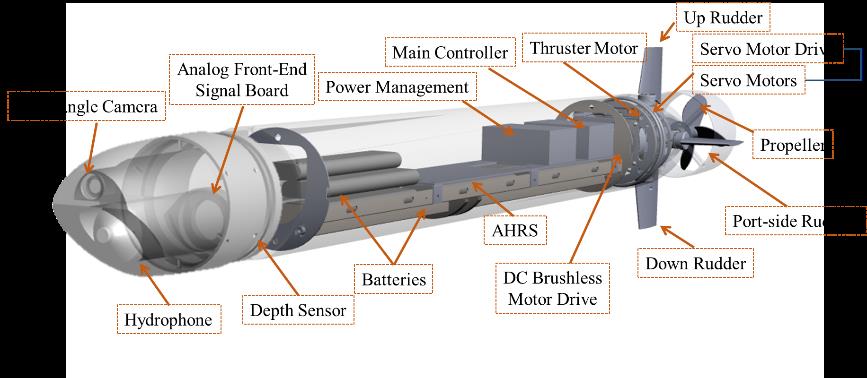
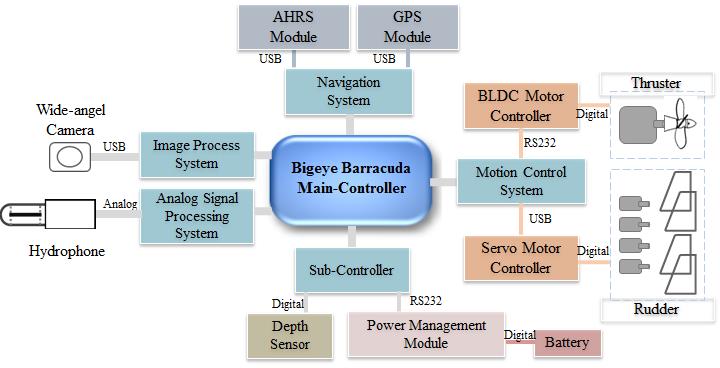
| 技術簡介 | 本技術基於團隊自行研發的AUV,開發一套光學與聲學整合系統以達成AUV可在視覺範圍外自主追蹤並跟隨聲波發送特徵的動態目標物,成具有聲光識別導航功能自主水下載具,應用於水下環境識別與導航創新技術整合架構。本技術促使自主水下載具應用範圍涵蓋大範圍三維水下環境探索及特定聲波物體追蹤與觀察任務需求。 |
||
| 科學突破性 | "1. 即時獲取聲光環境資訊進行識別,在無法預先標定的任務中提供獨特的優勢能力。如生物識別、棲地分析、汙染追查與海域巡查等。 2. 獲取水下環境聲光資訊,利於建構接近真實的水下環境模型,用於完整數值分析應用。 3. 追蹤具有特殊聲波紋物體近距離觀察與探索,例如,海疆域武器定檢與鯨豚生物遷徙路徑重建等 |
||
| 產業應用性 | 本技術創造多面向工產業應用,包含載體與機構產業(機構設計、材料開發)、軟韌體演算法產業(影像辨識、聲學定位、控制系統整合)、學科研機構(數值模擬分析、新材料研發)、系統驗證機構(整合功能測試、耐航性與潛深等)。AUV主要市場應用為海疆域防衛、近海與港灣結構保全、能源勘探與管道監測與海洋調查測繪等。 |
||
| 媒合需求 | 天使投資人、策略合作夥伴 |
||
| 關鍵字 | 自主水下載具 影像導航系統 影像導引系統 深度學習視覺導航系統 多重感測器數據融合 | ||
- 聯絡人
- 林宇銜
- 電子信箱
- vyhlin@mail.ncku.edu.tw
其他人也看了