:::
- 首頁
- /
- 年度
- /
- 2018
- /
- AI智慧應用&電子&光電
- /
- 影像式停車場空位偵測系統




| 技術名稱 | 影像式停車場空位偵測系統 | ||
|---|---|---|---|
| 計畫單位 | 國立中正大學 | ||
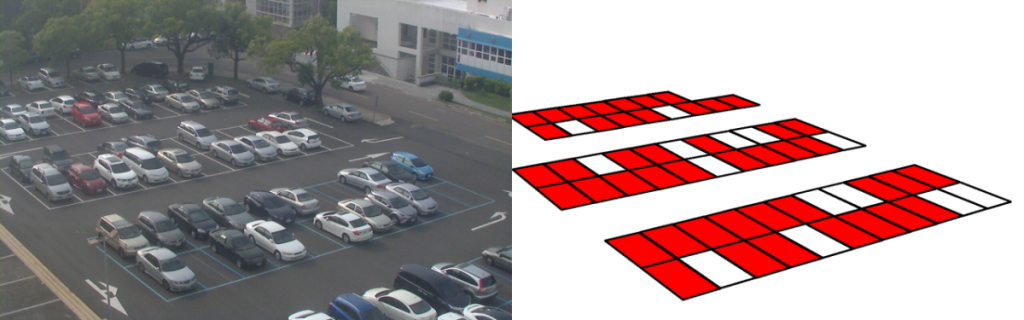
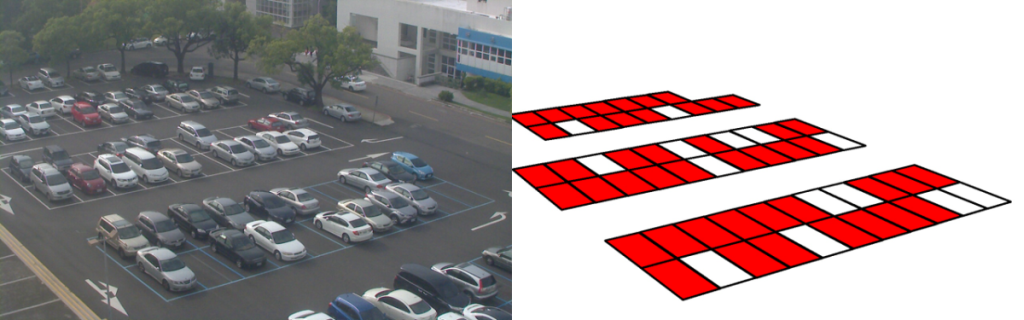
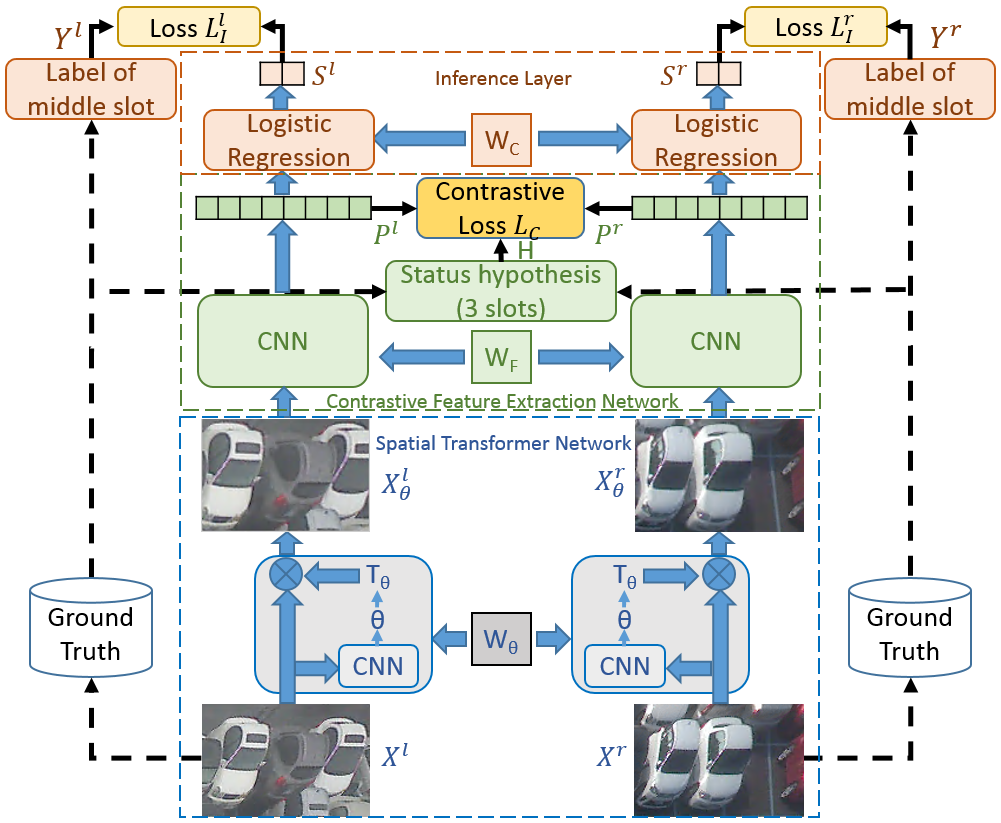
| 技術簡介 | 在此技術中,我們透過多層次的學習架構去實現停車空位偵測,使用三個模組達到穩定的空位偵測系統。一、深度學習模組:首先,為了要減少光影變化、透視失真、天氣變化和車輛間遮蔽的問題,我們引入基於卷積神經網路(Convolutional Neural Network,CNN )的深度網路架構,自動學習高階與低階的多階層特徵,比起人工所選用的特徵(Hand-crafted features)更具有多樣性,且透過大量訓練資料所學習的特徵,更適用於空位偵測演算法,而我們也認為由CNN提取的穩健特徵有助於解決車輛大小不一與停車所造成的位移等問題;二、空間轉換模組:將空間轉換網路(Spatial Transform Network,STN)整合到深度網路中,STN主要功能為自動選取合適的影像區域(Region of Interest,ROI),克服車輛大小不同以及停車位移所造成的困擾;三、對抗生成模組:為了解決車輛間遮蔽的問題,我們將三個相鄰車格作為輸入,並設計一個多任務損失函數同時考慮中間車格狀態與其左右相鄰車格狀態,同時考量中間車格以及鄰近車格進行狀態預測,進而減少車輛間遮蔽所造成的不穩定。此外,我們也引入孿生網路(Siamese Network)的架構,使整個網路能夠分離不同狀態間的語意距離,透過上述的三個模組,使得影像式停車空位偵測系統能穩定偵測停車空位。 |
||
| 科學突破性 | 過去的研究主要在解決室外光影變化與透視失真等問題,但若考慮到停車造成的位移、車輛大小不一致和車輛間遮蔽,此任務將變得十分棘手,為了克服這些問題,我們提出深度學習之網路框架來推論停車狀態。 |
||
| 產業應用性 | 當前市面上,停車位管理大致以機械式與感測式的系統為主,這樣的系統在過去已經廣泛地被討論與應用,並得到相當良好且穩定的效果。然而,這樣的系統主要以感測器等硬體裝置為主,功能性上較不具備擴充的彈性,同時,系統維護上的成本也無法有效被降低,這也促使部分專家學者思考另外可行的改進方案。近年來,監控攝影機的使用越來越普及,相關的應用性逐漸地受到注目,因此已有不少研究將視訊監控系統應用於停車場管理上,希望透過軟體與演算法的開發,利用影像分析,自動偵測停車空位,以提供停車導引服務。 |
||
其他人也看了