



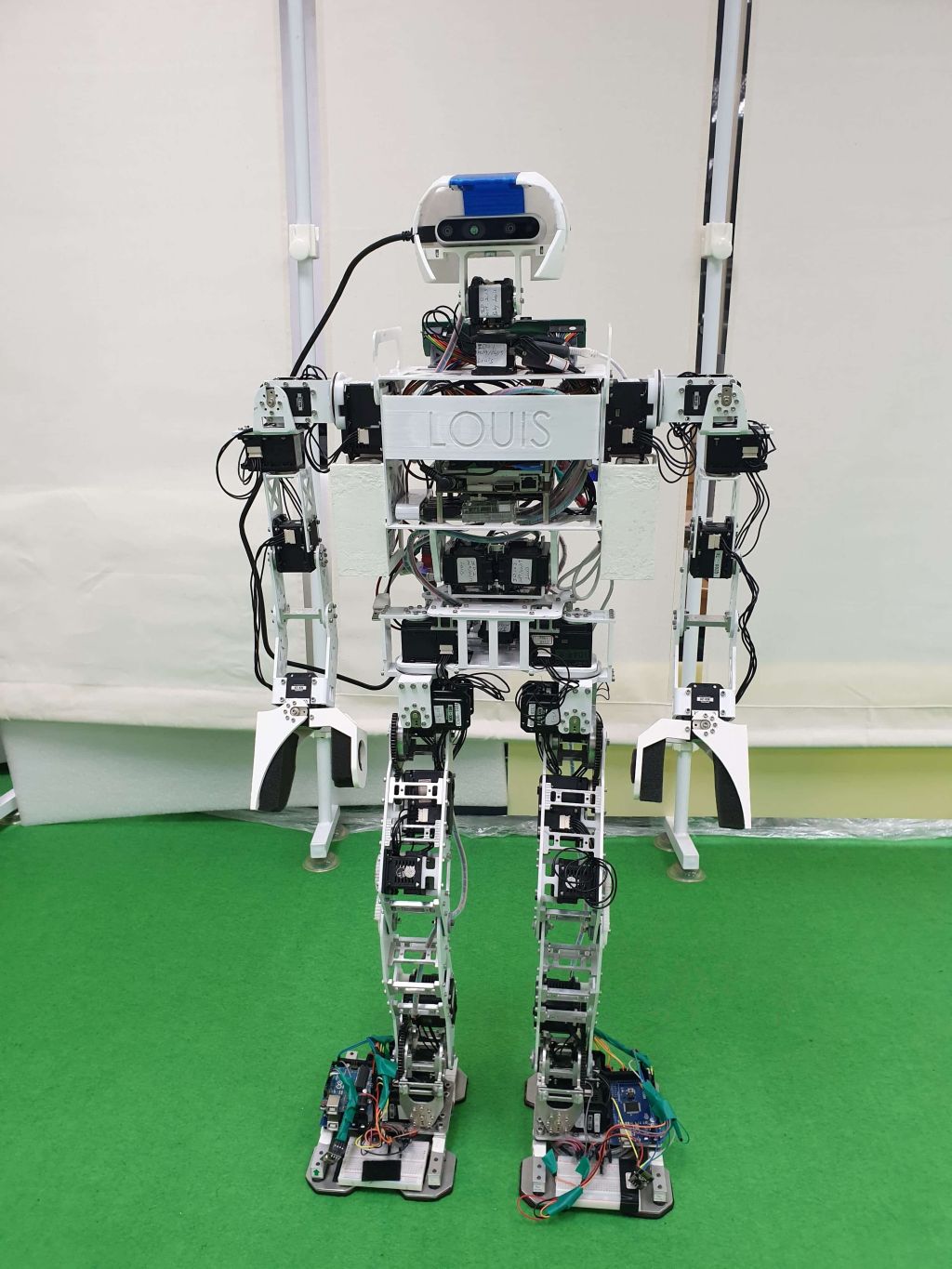
| Technical Name | Design and Implementation of Toddler-sized Humanoid Robot with Learning Capability | ||
|---|---|---|---|
| Project Operator | National Cheng Kung University | ||
| Project Host | 李祖聖 | ||
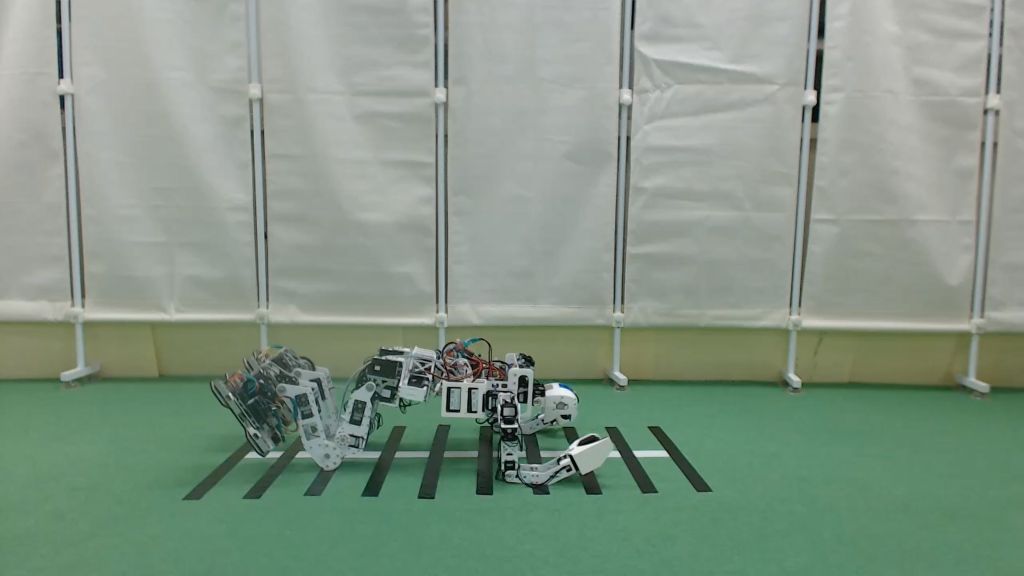
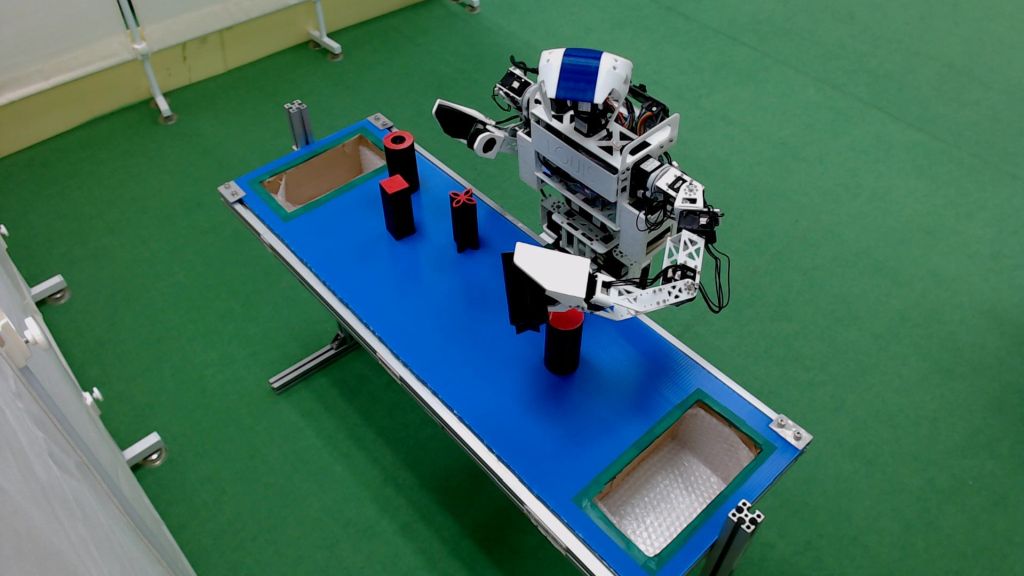
| Summary | A toddler-sized humanoid robot is proposed, which is designed by ABC algorithm and solve the transition between different motions by Q-learning. FDDQN combined with IMU and force sensors makes gait pattern adapt different terrain in real-time control. An unsupervised learning architecture with self-exploration strategy allow robot to learn concept during interaction with objects. |
||
| Scientific Breakthrough | Our humanoid robot is designed by a modified ABC algorithm, which combines with GA and PSO. Besides, robot can achieve a 3×11 obstacle map by Q-learning. A feedback system based on FDDQN not only real-time computes but predicts the suitable gait parameters. An unsupervised learning system allows robot to incrementally develop its intelligence during interaction with environment. |
||
| Industrial Applicability | The novel ABC algorithm can find the best robot architecture. FDDQN feedback system let robot adapt to the change of terrain and correct the direction to balance the center of gravity. The robot can incrementally develop the knowledge by interacting with environment without human help. The proposed AI based design method can be also applied to design and implement a novel AI based robot. |
||
| Keyword | Humanoid Robot Cognitive Development Intelligent Learning Algorithm Fuzzy Double Deep Q-Network (FDDQN) Modified Artificial Bee Colony Unsupervised Learning Explorative Learning Genetic Algorithm Q-learning Convolutional Neural Network | ||
- wenyi@mail.ncku.edu.tw
other people also saw