



| 技術名稱 | 具有學習能力之幼兒型人形機器人之研製 | ||
|---|---|---|---|
| 計畫單位 | 國立成功大學 | ||
| 計畫主持人 | 李祖聖 | ||
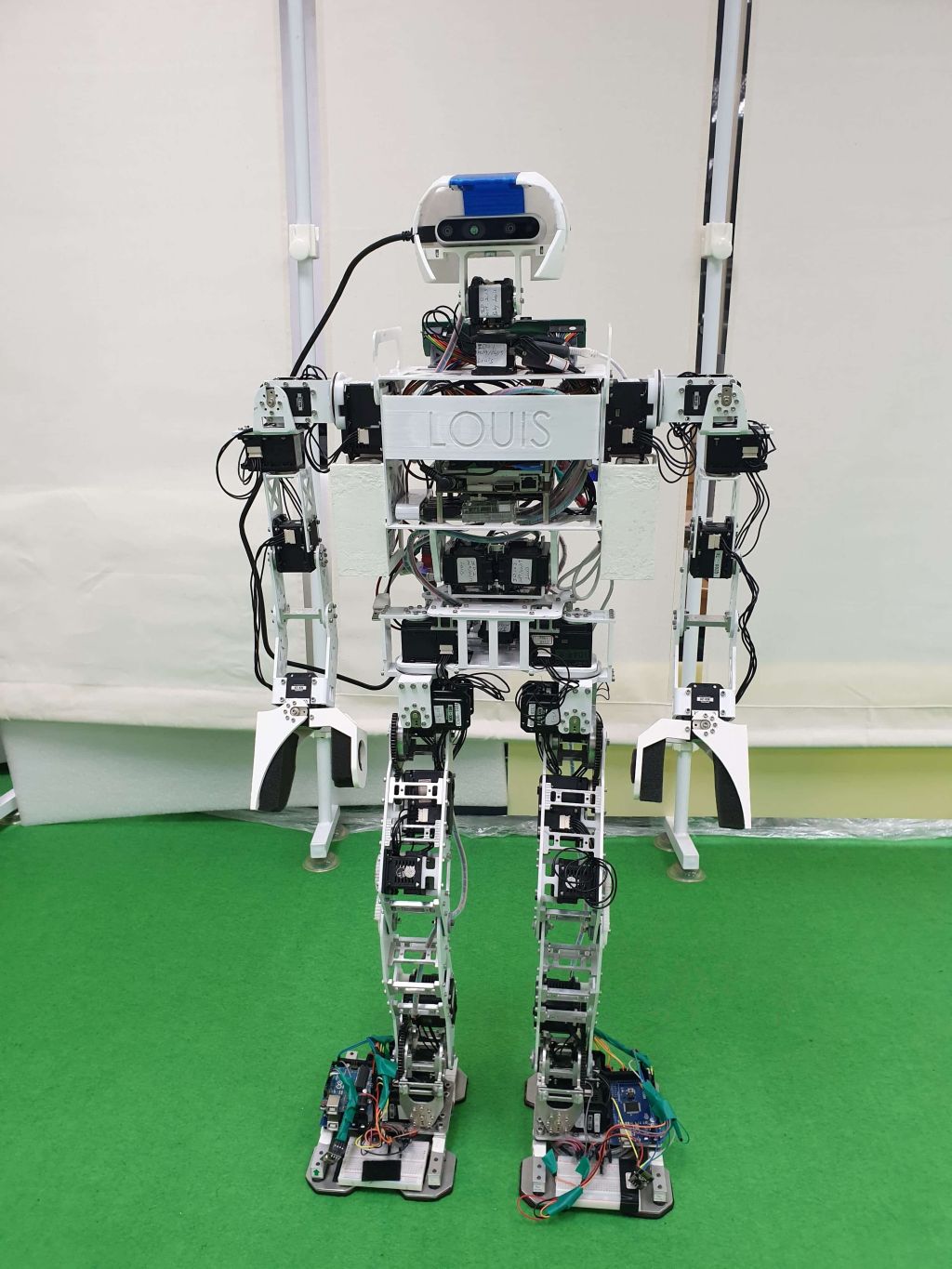
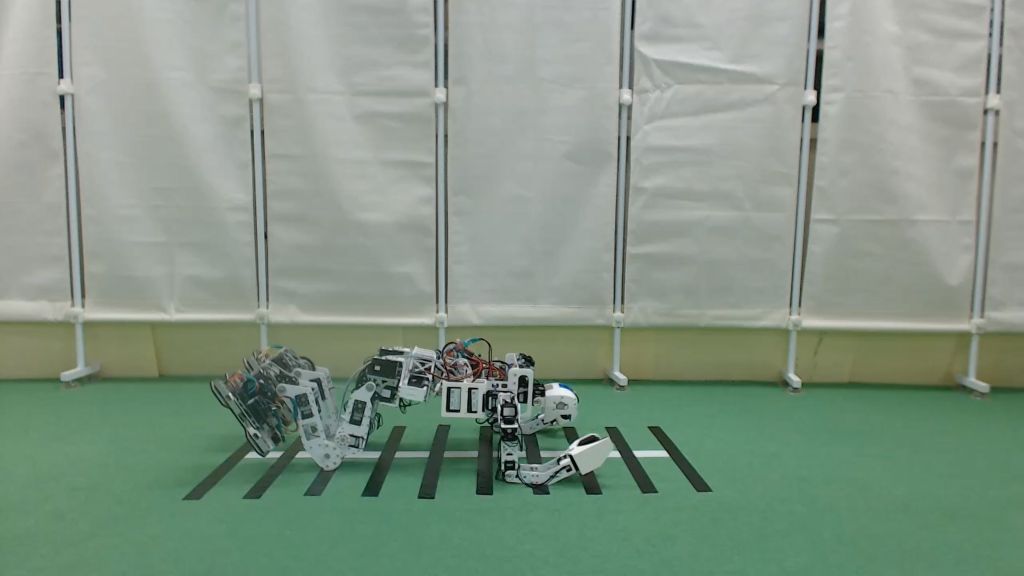
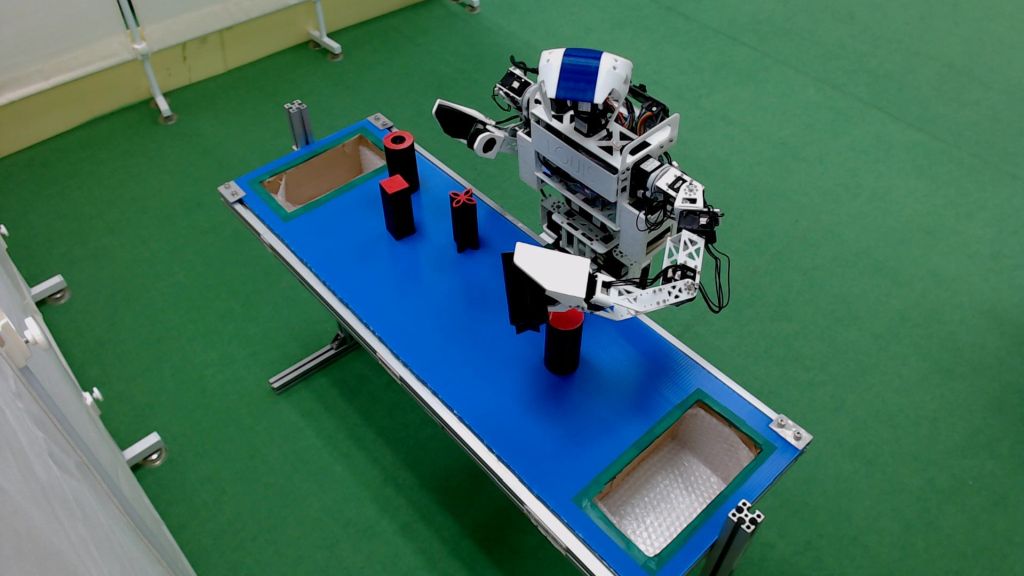
| 技術簡介 | 透過人工蜂群演算法設計幼兒機器人機構,並以Q-learning學習動作轉換。Fuzzy Double Deep Q-learning Network搭配慣性量測單元與腳底壓力感測器讓機器人走得平穩並以動態控制適應不同地形。使用非監督式學習架構搭配探索策略,讓機器人能如幼童在無人環境中與物件互動並學習。 |
||
| 科學突破性 | 利用引入基因與粒子群演算法改良的蜂群演算法設計機器人。以Q-learning學習肢體動作間的轉換並使用Fuzzy Double Deep Q-Network 學習雙足步態的即時動態控制。在機器人自主探索物件的過程中,以Autoencoder搭配非監督分群演算法學習物件認知,此學習過程無人類協助。 |
||
| 產業應用性 | 本計畫結合ABC、GA、PSO等生物啟發式演算法設計機器人架構,此機器人能爬行、蹲起、站起及行走的基本行動能力。並以Q-learning學習不同動作間的轉換以及FDDQN動態控制行走。非監督式AI學習搭配探索策略,讓幼兒機器人能在無人環境中與物件互動並學習。此機器人能自主學習動作與認知,是為能夠學習成長的智慧型機器人。 |
||
| 關鍵字 | 人形機器人 幼兒認知學習 智慧學習演算法 模糊深度加強式學習網路 改良式人工蜂群演算法 非監督學習 探索學習 基因演算法 Q 學習法 卷積神經網路 | ||
- 聯絡人
- 謝文怡
- 電子信箱
- wenyi@mail.ncku.edu.tw
其他人也看了