




| 技術名稱 | 以深度學習為基礎之仿人型機器手臂控制與研製 | ||
|---|---|---|---|
| 計畫單位 | 國立臺灣海洋大學 | ||
| 計畫主持人 | 謝易錚 | ||
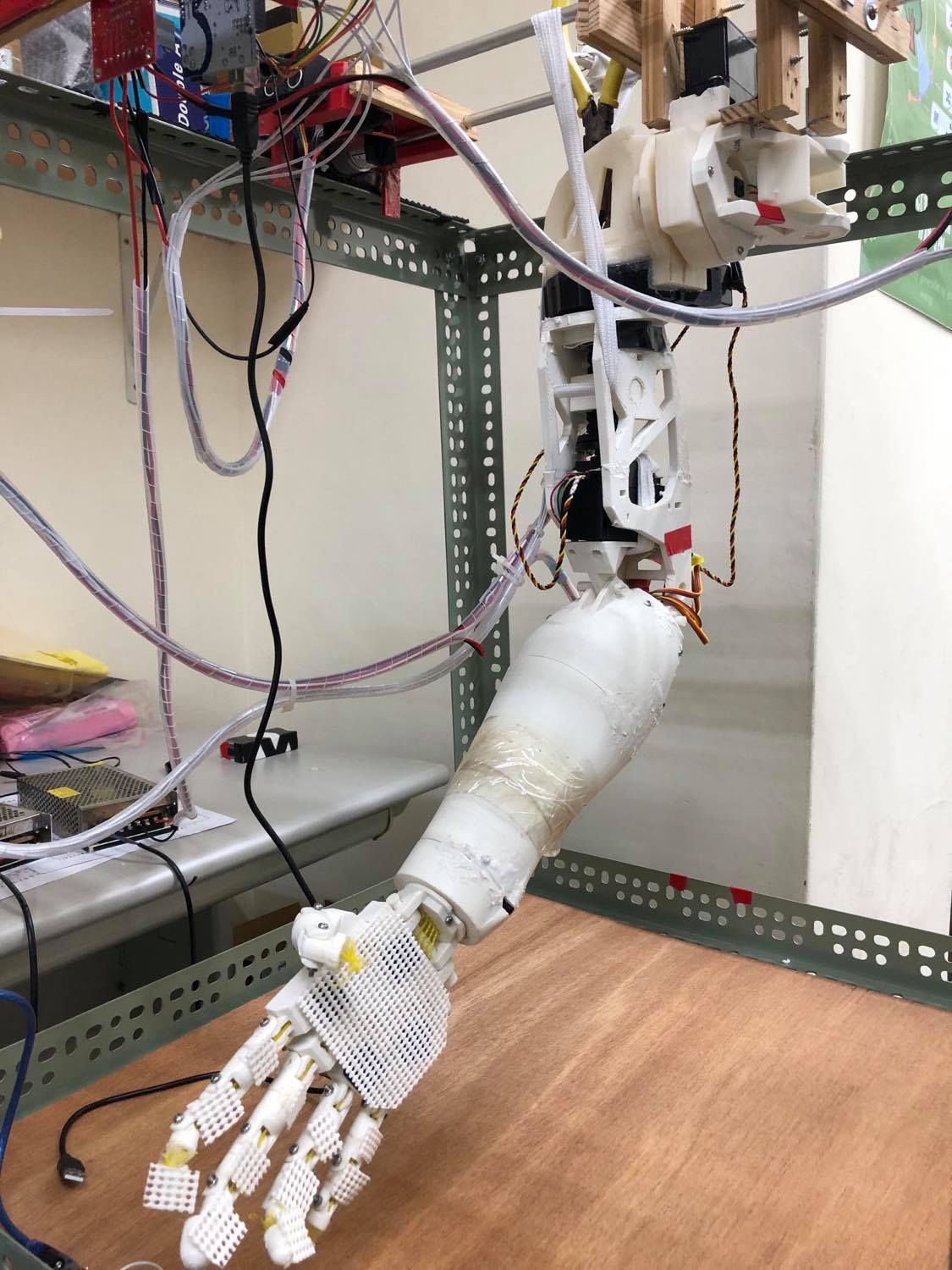
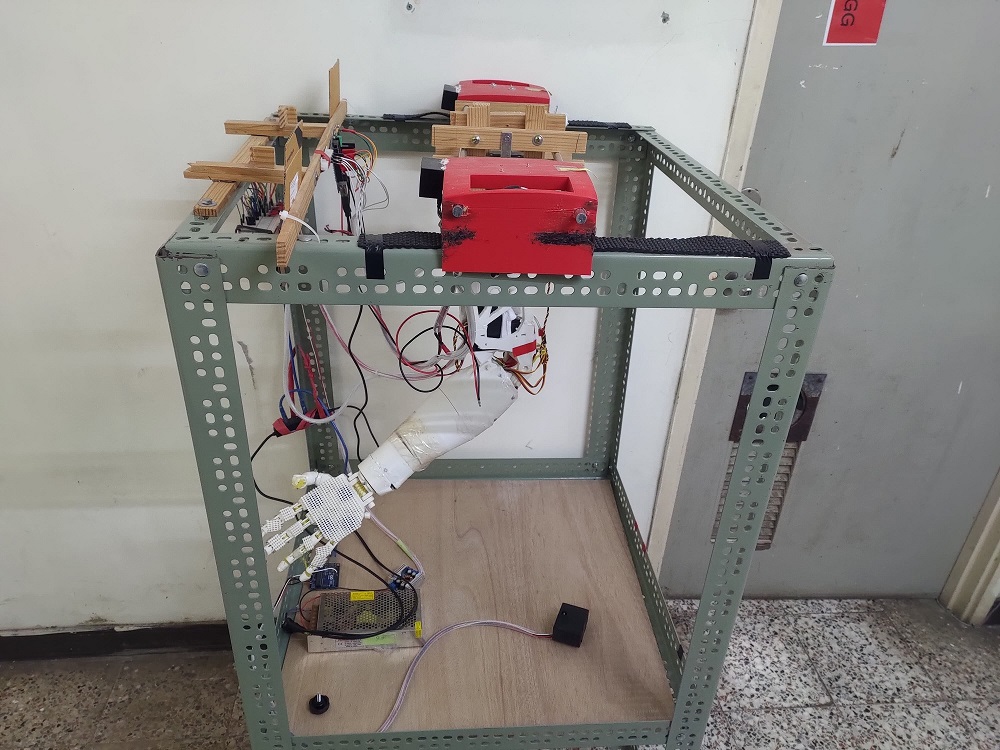
| 技術簡介 | 本主題目的為實現一套以深度學習為基礎的機器手臂平台,主要探討現今流行的深度學習技術如深度神經網路(Deep Neural Networks, DNN)、卷積神經網路(Convolutional Neural Networks, CNN)間的差異,並以最近出現的生成式對抗網路(Generative Adversarial Network, GAN)作為本主題主要研究方法,並利用上述三種方法建立機器人運動學,以運動學角度分析的GAN 與傳統主流模型間的優劣。 |
||
| 科學突破性 | 本主題使用多個深度學習網路架構組合而成,並以生成式對抗網路(Generative Adversarial Network, GAN)建立機器手臂的運動學,有效解決因環境或當前狀態不佳,導致傳統逆向運動學控制手臂輸出結果的誤差。 |
||
| 產業應用性 | 機器手臂在進行任務時,常會遇到求解逆向運動學的問題,在現實世界中,傳統逆向運動學控制手臂,會因環境或當前狀態不佳,影響整體輸出精度。 |
||
| 關鍵字 | 人型機器手臂 生成對抗式網路 目標物檢測 深度學習 機器人運動學 深度類神經網路 嵌入式系統 人工智慧 卷積類神經網路 自動化機器手臂 | ||
- 聯絡人
- 謝易錚
- 電子信箱
- yzhsieh@email.ntou.edu.tw
其他人也看了