




| 技術名稱 | 機械手臂的教導系統及其控制方法 | ||
|---|---|---|---|
| 計畫單位 | 國立台北科技大學 | ||
| 計畫主持人 | 林顯易 | ||
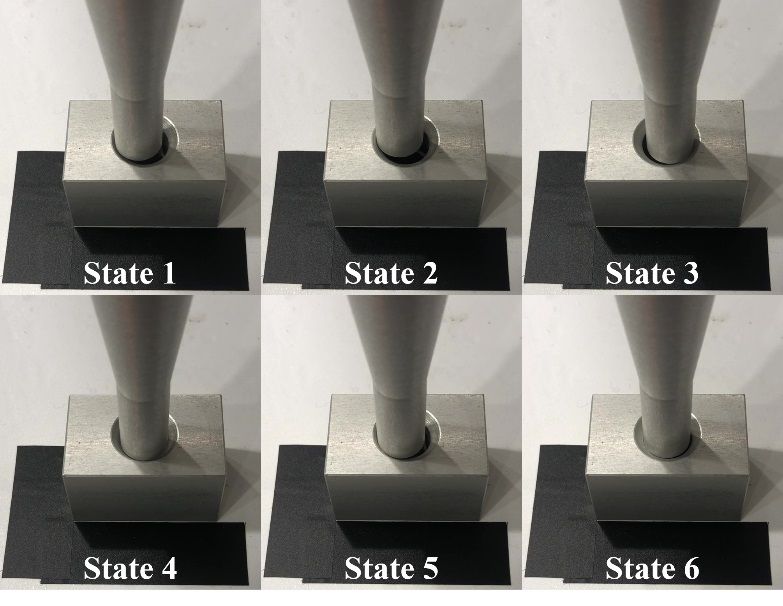
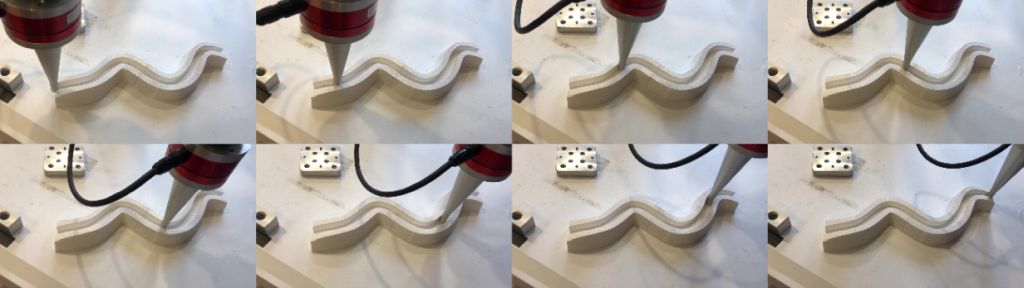
| 技術簡介 | 智慧機械手臂教導與軌跡學習系統,無需寫程式做法將工業機械手臂導入工廠複雜工作任務,且機器手臂可以自主學習軌跡規劃,可進行線上校正。 |
||
| 科學突破性 | 具有軌跡學習與教導「不用寫程式」協作式工業機械手臂,特點為具有自主學習功能、精度高、方便使用性高、可升級現用機械手臂。 |
||
| 產業應用性 | 本技術可加速工業機械手臂導入複雜的工廠組裝插件工作任務,透過本系統方法得到一致性的解決。本技術於產業應用特性: 少量多樣產品,無需具有機械手臂專業背景操作員、機械手臂自主學習達到自動軌跡校正,無需由人員重新調整軌跡。 |
||
| 關鍵字 | 不用寫程式 協作式工業機械手臂 簡易教導 自主軌跡學習 自動軌跡校正 組裝 插件 智能學習 少量多樣 工業4.0 | ||
| 備註 | 部分技術影片 |
||
- 聯絡人
- 林顯易
- 電子信箱
- sofin@ntut.edu.tw
其他人也看了