





| 技術名稱 | 整合智慧視覺與靈活多功能雙臂機器人 | ||
|---|---|---|---|
| 計畫單位 | 國立清華大學 | ||
| 計畫主持人 | 張禎元 | ||
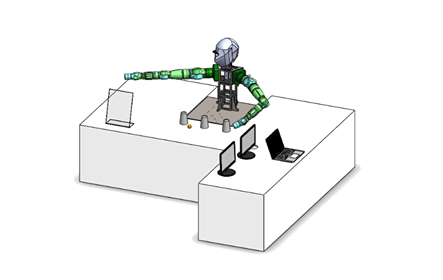
| 技術簡介 | 為了因應與開拓未來機器人能更加大眾化與普及化地進入民生用途,如巡邏、導覽以及照護等用途,本團隊已發展出一緊湊型輕量擬人雙手臂機器人,該機器人之機械臂尺寸只比成年人的手臂略大,與傳統工業型六軸機械手臂相比,本案擬人機械手臂為七軸,以緊湊的機電整合設計使其在複雜環境中能更加地靈活且易於操作。再加上該手臂本體重量不到15公斤,這項優點可額外配合無人載具,使其應用範圍大幅提升。除此之外,在這樣緊湊與輕量化的設計之下,該機械手臂依然有5公斤的負載能力,扣除末端效應器(End effector)的重量之,該手臂仍有裕度抓取多數物品及呈現生活中常見動作。另一方面,本團隊亦開發一多目標辨識追蹤視覺系統,利用AI技術可有效在具有遮擋的情境下辨識多個目標。除可之外,本團隊利用旋轉單一相機並結合機器人精準控制與即時手眼協調校正誤差技術,可在不需要影像縫合的情況下來增進整體視野(Field of vision),而且能夠將視覺辨識到的目標在現實空間中定位,以利該擬人雙手臂機器人能在擴增後的視野中,順利追蹤且精準有效夾取物品。 |
||
| 科學突破性 | 本團隊與工研院合作開發之機械手臂,與傳統6軸機械手臂相比,7軸機械手臂提供了1個冗餘自由度,並且與人之肩膀、手肘、手腕等7個自由度相呼應。整合於雙手臂平台之AI視覺辨識以及即時手眼校正技術,得以讓機器人自動辨識、即時追蹤並且精準夾取物體。讓機械手臂不再只會執行教導好的路徑,賦予其彈性且多工的應對力。 |
||
| 產業應用性 | 類人型雙手臂能夠應用於許多需要勞力且危險的工廠,如噴塗、焊接等工作,若搭配上視覺辨識定位系統,則能做到如夾取與分類等項目。在民生用途之服務型機器人領域當中,則可應用於居家照護、陪伴、做家事,並且在未來搭配移動式載具則可達成保全巡邏等工作,許多需要勞力密集之產業都有其未來產業應用性。 |
||
| 關鍵字 | 七軸機械手臂 緊湊型馬達關節模組 即時手眼校正 多物體追蹤視覺 類人型機器人 隨機物夾取 雙手機器人 相機旋轉模組 視覺伺服 類人型雙手機器人 | ||
| 備註 | 本技術相較去年成果,擬人七軸手臂從實驗室階段的單隻手臂研究推進至較為成熟的雙手擬人機器人平台。除了延續去年成果,如壓力感測、IMU姿態感測、擬人七軸單臂機器人等,本次研究成果更加入視覺回授以及AI視覺辨識來達到智慧化以及自動化機器人展示,以展現未來機器人的發展性。附件資料為與去年展示成果及其延續研究之佐證資料,而今年之展示成果則如圖片以及影片連結所示。 |
||
- 聯絡人
- 李俊則
- 電子信箱
- ctlee@gapp.nthu.edu.tw
其他人也看了