




| Technical Name | Robot Teaching system and control method thereof | ||
|---|---|---|---|
| Project Operator | National Taipei University of Technology | ||
| Project Host | 林顯易 | ||
| Summary | The intelligent robotic arm teaching and trajectory learning system can be used to apply to complex manufacturing tasks without programming, and the robotic arm can learn the trajectory planning autonomously and can perform online calibration. |
||
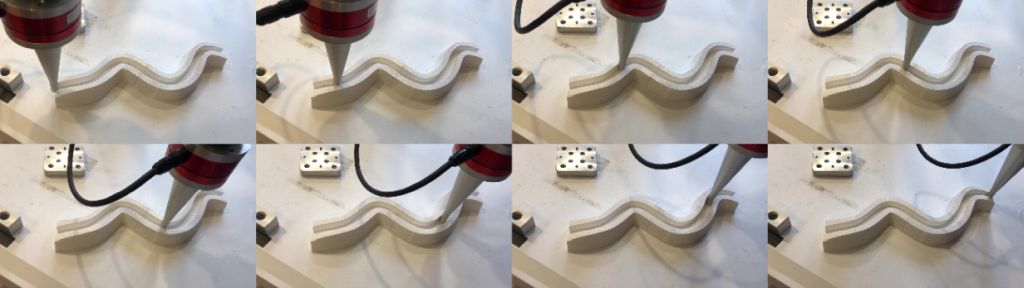
| Scientific Breakthrough | The proposed collaborative industrial robots have the advantages of convenience and reproducibility, and they have intelligent trajectory learning to plan trajectories autonomously in an unknown environment. This function is not available on available commercial robots. |
||
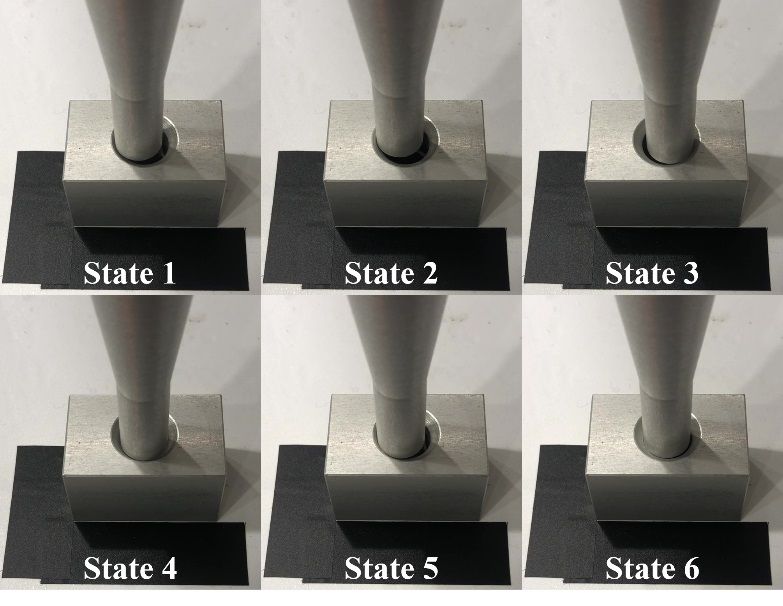
| Industrial Applicability | This technology is suitable for small and medium scale companies to improve automation. The characteristics of the applications of using this technology: a small number of diverse products, no need to have a robot-background operator to use the robotic arm, and online trajectory learning for calibration. The economic benefits include lowering down manufacturing cost and increasing manufacturing flexibility. |
||
| Keyword | Non-programming collaborative industrial robot easy teaching autonomous trajectory learning automatic trajectory calibration assembly insertion intelligent learning small number of diverse products industry 4.0 | ||
- sofin@ntut.edu.tw
other people also saw