





| Technical Name | Multi-rotor UAV high-precision fixated hoveringpinpoint landing | ||
|---|---|---|---|
| Project Operator | Department of Computer Science, National Chengchi University | ||
| Project Host | 劉吉軒 | ||
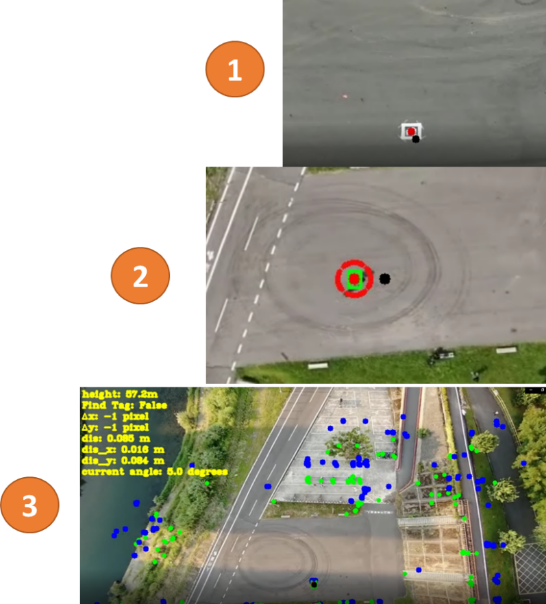
| Summary | This technology provides autonomous control capability for multi-rotor UAV’s high precision fixated hoveringpinpoint landing. Visual perceptionnavigation control are integrated to automat the process of taking off from a marked spot, vertically ascending to required task altitude, maintaining precision hovering, until task completion, performing pinpoint landing on the marked spot. This technology can also be used to maintain visual lock on target object, moving along with the target object while maintaining overhead hoveringsurveillance. |
||
| Scientific Breakthrough | Designed for multi-rotor UAV with only single camera, this technology adopts self-positioning framework under the circumstance of no GPS signal. The primary technological breakthrough is long-ranged precision positioning with visual lock on target object. By integrating visual perception with navigation control, precise dynamic position adjustment is attainable for task requirement. This technology shows new breakthrough in multi-mode positioning, automatic mode switch, changeable range from short to long distance, full autonomy, upper level navigation,real-world validation. At the flight altitude of 100 meter, the maximum positional deviation is only 0.31 meter. |
||
| Industrial Applicability | Industrial applications of this technology include aerial communication base station with long hang time, ground image acquisitionland survey, tracking observationsurveillance on target object, precisionsafe landing for intelligent aerial logistics. This technology can also combine with a computing module for obtaining geographical locationprovide accurateprecise geographical coordinates of target object location, therefore, extending higher task value. In addition, this technology serves the dual purpose of civil applications in peace timemilitary applications in war time. |
||
| Keyword | UAV high precision positioning variable distance positioning pinpoint landing automatic navigation control mode switching mechanism graphical tag positioning object tracking positioning image feature positioning geo-referencing | ||
- Contact
- Gong-Yi Lee
- james88385542@gmail.com
other people also saw