:::
- 首頁
- /
- 年度
- /
- 2018
- /
- AI智慧應用&電子&光電
- /
- 無人機自主智慧控制系統




| 技術名稱 | 無人機自主智慧控制系統 | ||
|---|---|---|---|
| 計畫單位 | 國立政治大學 | ||
| 計畫主持人 | 劉吉軒 | ||
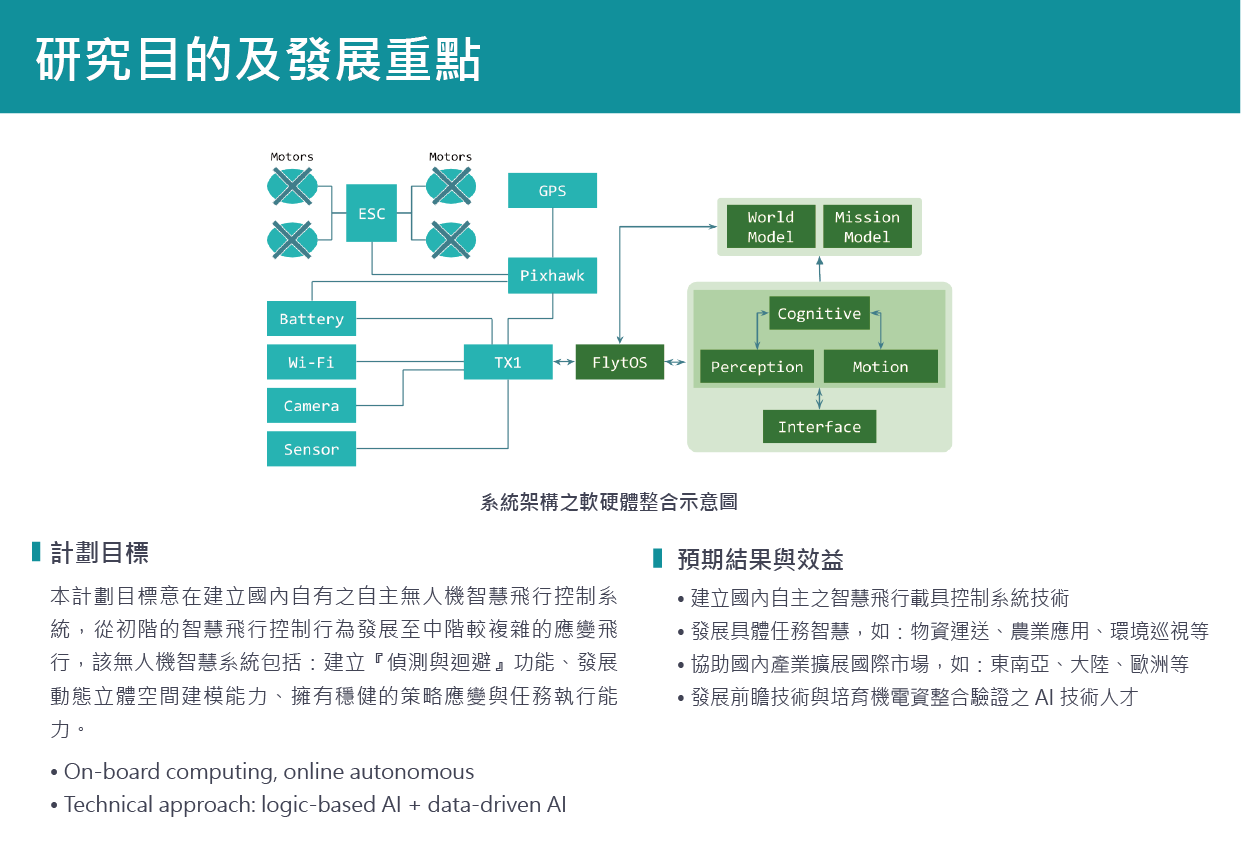
| 技術簡介 | 本技術開發無人機自主智慧飛行控制系統,從初階的智慧飛行控制行為,到中階於較複雜環境中執行任務的應變飛行,以深度學習及認知計算架構為基礎,透過無人機之即時環境感知能力,結合動態立體空間建模與路徑規劃技術,依照情境做穩健的策略應變,並輔以視覺化介面監控無人機即時資訊。最終將彙整各模組的智慧判斷,應用於業 |
||
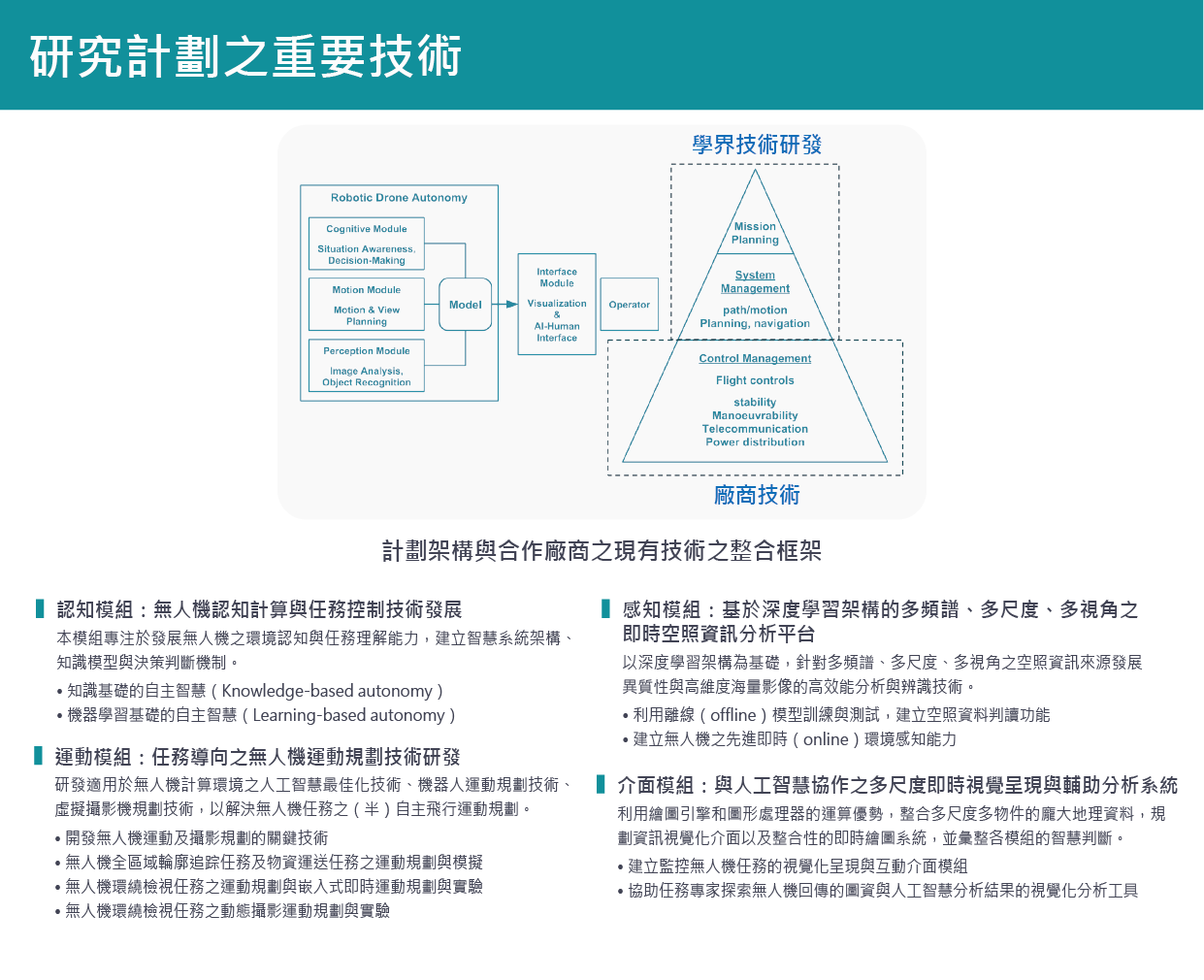
| 科學突破性 | 本技術以整合性的自主智慧控制系統為特色, 並以現有飛行機器為開發測試平台, 可真實驗證技術成果. |
||
| 產業應用性 | 本技術可與相關無人機應用產業直接合作, 以特定具體任務為切入點, 發展任務情境與地理環境特徵之先備知識, 導入智慧控制能力, 進行先期開發測試與驗證 |
||
| 關鍵字 | |||
- 聯絡人
- 黃彥庭
- 電子信箱
- futuretech.most@gmail.com
其他人也看了