



| 技術名稱 | 基於同步定位與地圖構建的無人機建物檢視系統 | ||
|---|---|---|---|
| 計畫單位 | 國立政治大學 | ||
| 計畫主持人 | 劉吉軒 | ||
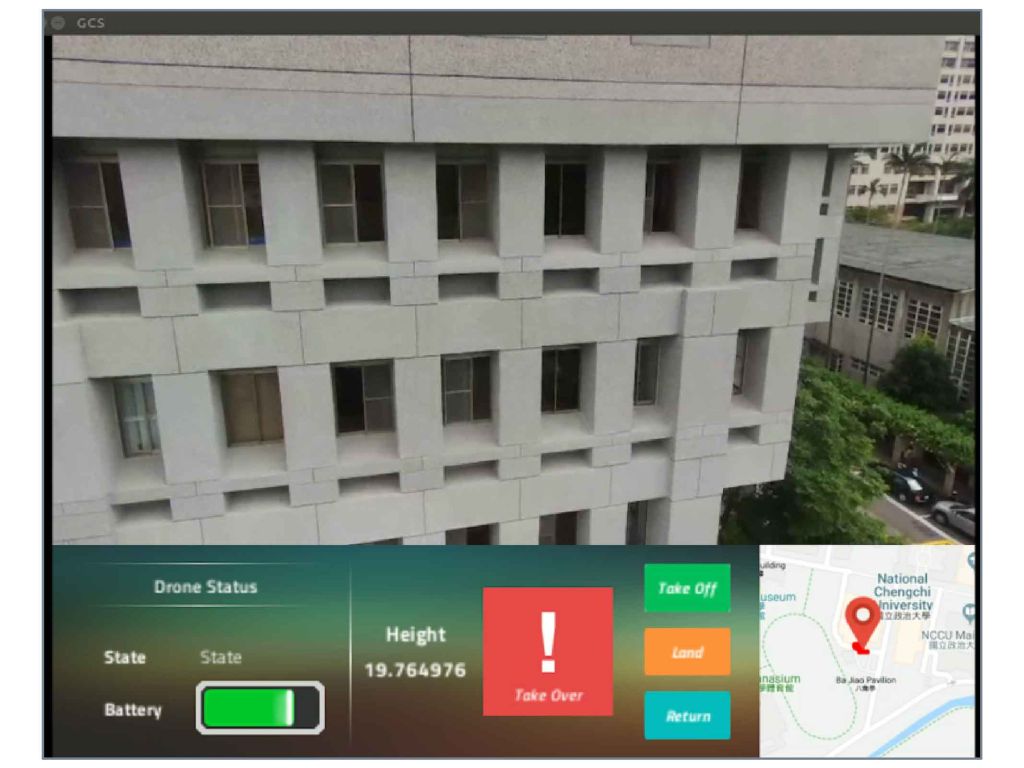
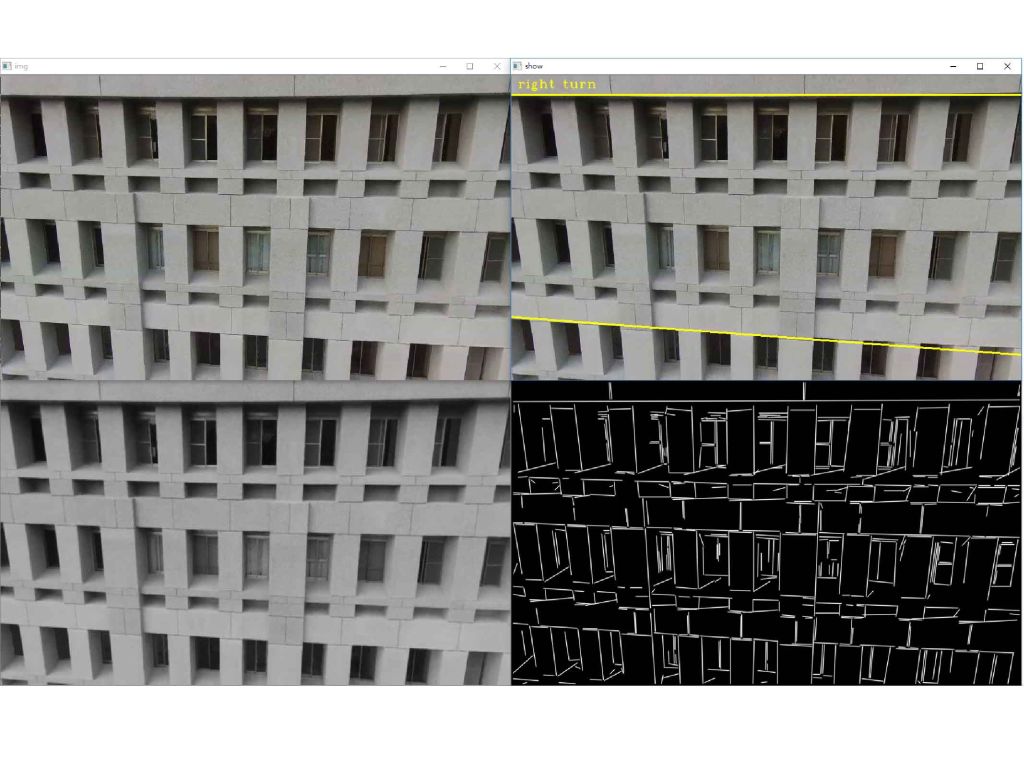
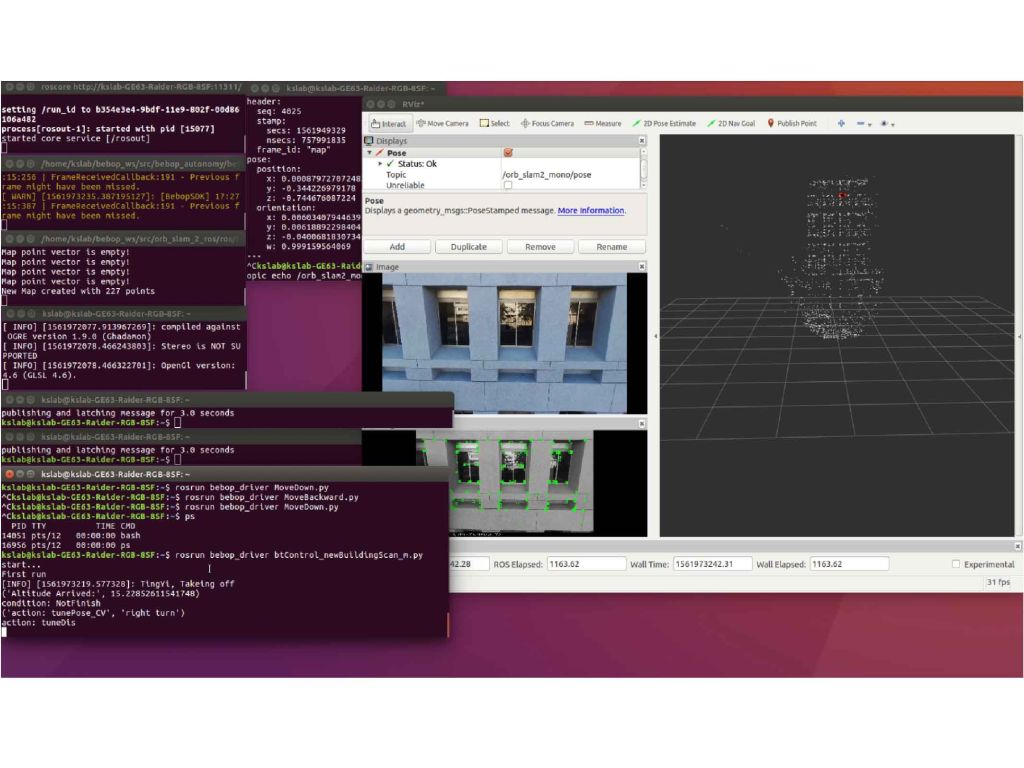
| 技術簡介 | 本技術透過路徑規劃、電腦視覺以及決策控制等技術,使無人機能夠自主進行建築環繞檢視任務。透過地面站啟動無人機,讓無人機針對指定的建築物進行環繞檢視,並在檢視完成後回到起飛的位置,產出一份檢視影片。 |
||
| 科學突破性 | 目前國際上的無人機研究多著重於單一技術功能的開發,較缺乏較全面的系統能夠讓無人機自主執行各類不同的任務。本技術經過真實場域的測試,對於無人機執行的任務有較高的掌握,系統也具備較高的容錯能力,在發生錯誤時能緊急暫停進行錯誤排除,並讓無人機於空中重新啟動繼續執行任務。 |
||
| 產業應用性 | 本技術可以協助相關單位進行建築物整修的驗收,對重要設施從多方角度進行定期檢視以確保安全性,也能用來了解評估建築物現況。 |
||
| 關鍵字 | 無人機 自主智慧系統 行為樹 SLAM 地面站 即時運算 電腦視覺 路徑規劃 空間模型 使用者介面 | ||
- 聯絡人
- 宋如泰
- 電子信箱
- archsoong@gmail.com
其他人也看了