




| Technical Name | Breakthroughsachievements of key technologies of six-axis force/torque sensor | ||
|---|---|---|---|
| Project Operator | National Sun Yat-sen University | ||
| Project Host | 王郁仁 | ||
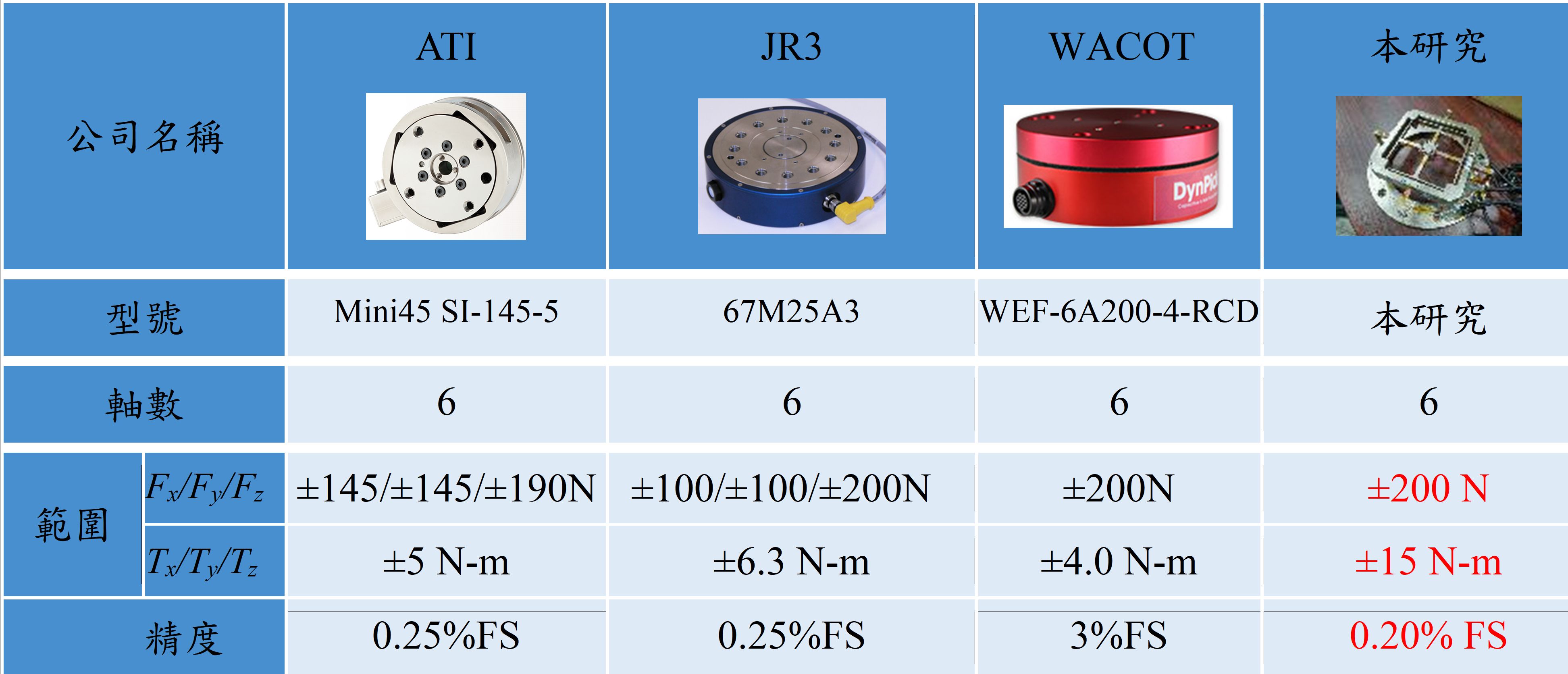
| Summary | Multi-axis force/torque sensors are key components of precision machinesrobot arms. Development of the multi-axis force/torque sensor is a popular research topic in Taiwan. This research developed design methods, calibration machinescalibration algorithms for multi-axis force/torque sensors. These efforts contribute the enhancement of precision of 0.20 (1.25 times than commercialize pro |
||
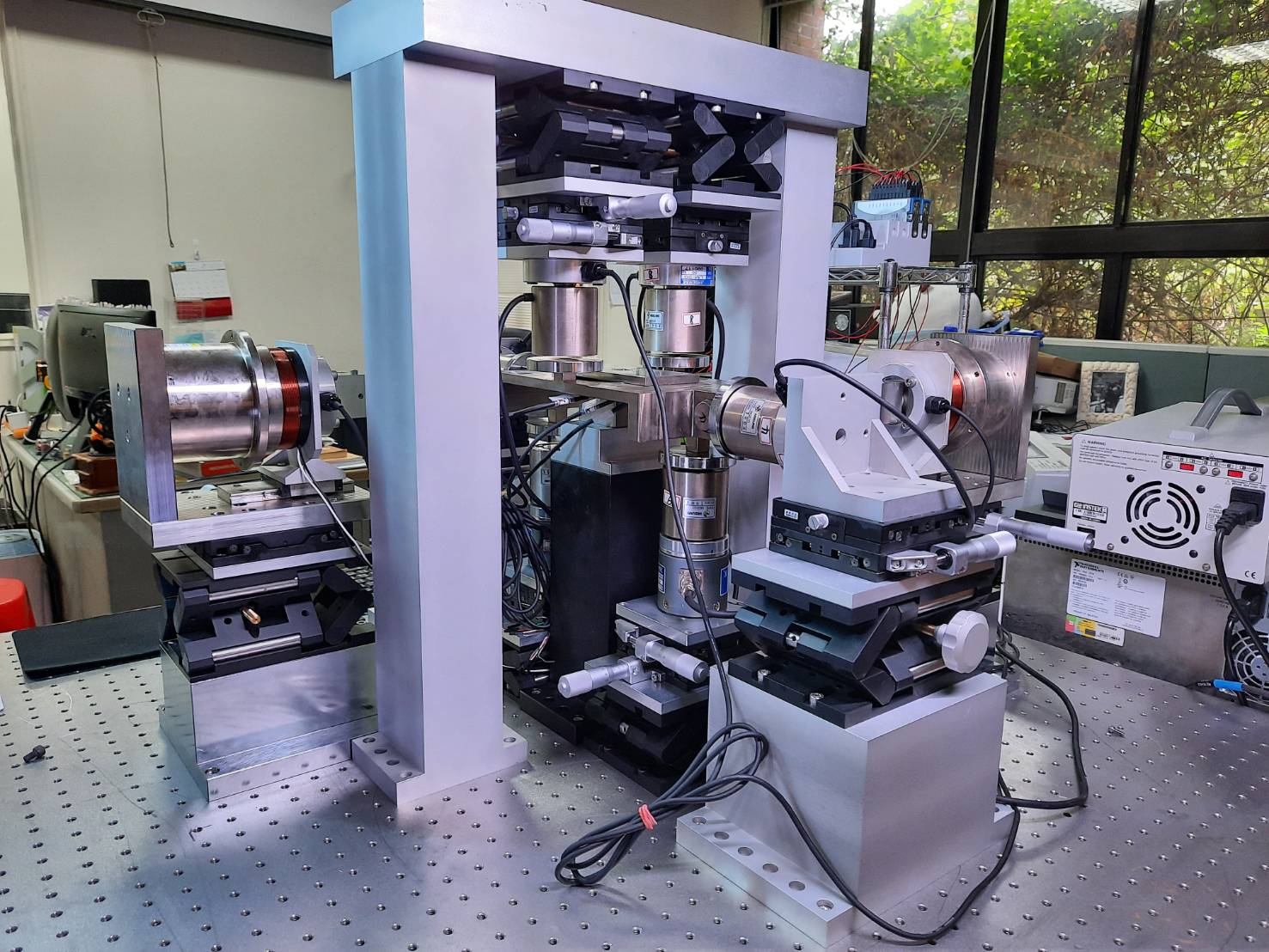
| Scientific Breakthrough | When the dual frame force/torque sensor developed by this study is integrated with the proposed artificial neural network calibration methodthe six-axis synchronous calibration machine, the force measurement range for Fx, Fy,Fz was ± 200 N,the torque measurement range for Tx, Ty,Tz was ±15 N-m. Most crucially, a calibration precision level of 0.20 was achieved. This precision |
||
| Industrial Applicability | We are developing industry chains of multi-axis force/torque sensors in Taiwan. Upstream companies provide multi-axis force/torque sensors to enhance multi-applications for downstream companies. The effects are in-depth. We have collaborated with four companiesindustry research institutes in recent years. The total technique transfer income is 562 thousand NT dollarsbusiness income is 3, |
||
| Keyword | Multi-axis force/torque sensor Force calibration Least mean square Deep learning Neural network Strain gauge Precision machinery Robot arm Force calibration machine Precision | ||
- lo_yu_jan@g-mail.nsysu.edu.tw
other people also saw








