| Summary |
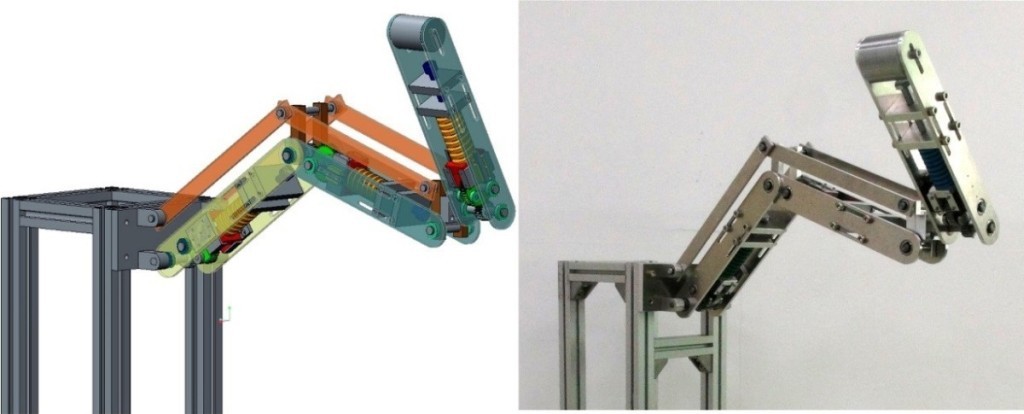
Based on the proposed spring balancing module (patented), which consists of a compression spring and a spur gear pair, a gravity balancing, spatial, 3-dof, articulated manipulator is practically constructed. Due to the perfectly static balance of the system, the manipulator can be held at any posture and only a comparatively small actuator force is required to drive the manipulator to other configuration. As a result, control and the precision positioning of the manipulator can be easily accomplished. |
| Scientific Breakthrough |
This technology features as follows:
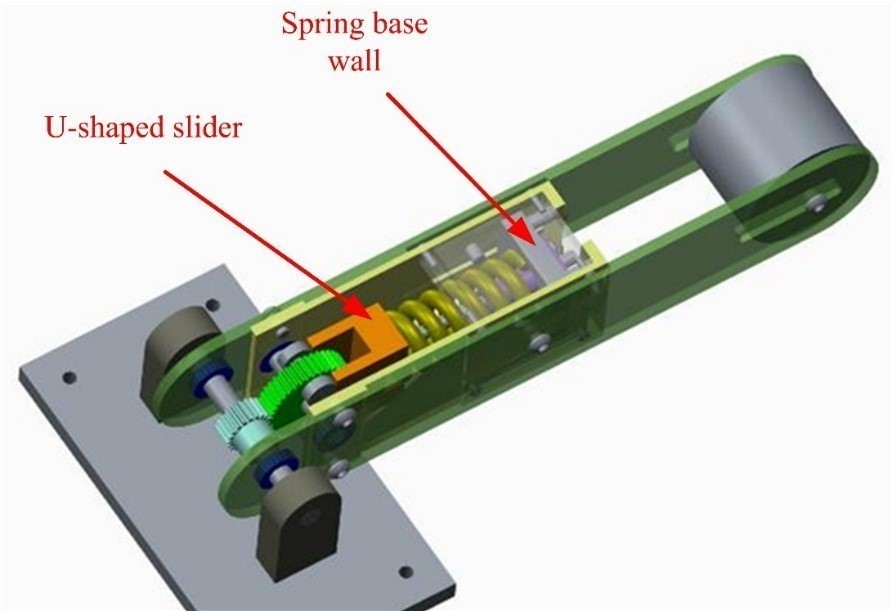
1.Spring balancing module is simple in structure and free of balancing error. (ROC patent I580540).
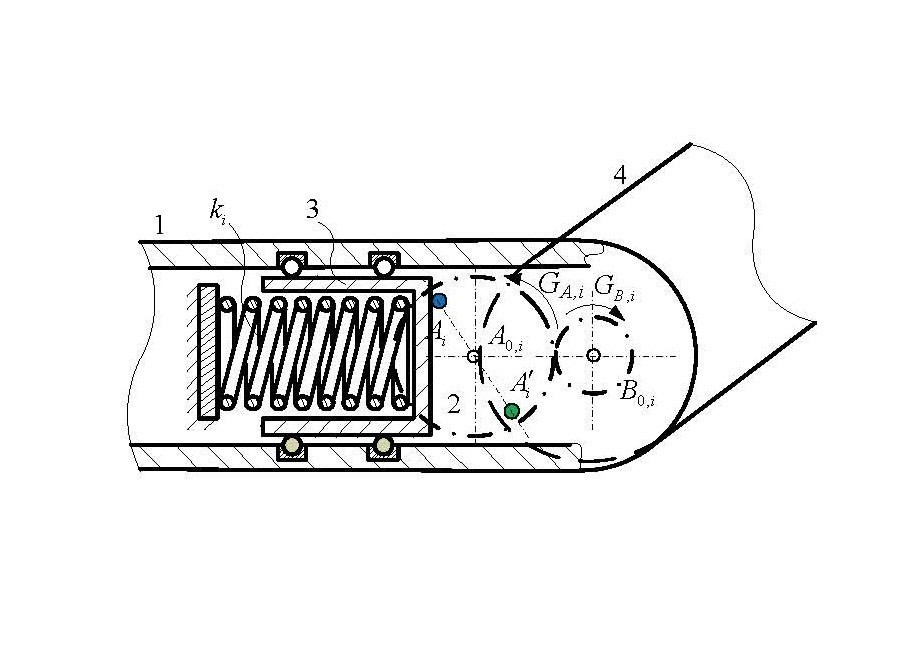
2.Spring balancing module consists of only a modified Scotch yoke mechanism, a compression spring and a spur gear pair.
3.Gravity balancing can be achieved within 360 degrees of rotation in the vertical plane.
4.Spring balancing module can be easily replaced if various payloads are employed.
5.System can be held stationary at all postures and only small force is required to actuate.
6.Spring balancing module can be installed in either single- or multiple-articulated-joint manipulator.
7.Only N spring balancing modules are required for N-dof articulated manipulator, which can prevent the large amount of internal force, guaranteeing the safe operation of the manipulator.
8.The spring balancing module successfully demonstrate it applicability in the gravity balancing of a spatial manipulator.
The industrial application fields and the applicable areas of this technology are described as follows:
1.Fields of industry:Mechanical engineering, automation engineering, medical engineering, and civil livelihood industry.
2.Application areas: Design of industrial robot arms, weight-reduction/Transportation and handling devices, and livelihood/medical suspension systems.
3.Market potential: Since the present invention can effectively reduce the driving force of the joints of the manipulator and has a good effect on the precision positioning and control of the mechanical arm, it is particularly suitable for the application of high value-added medical equipment hanging and surgical instruments |