



| Technical Name | Trajectory Planning for UAV Data Gathering | ||
|---|---|---|---|
| Project Operator | National Tsing Hua University | ||
| Project Host | 洪樂文 | ||
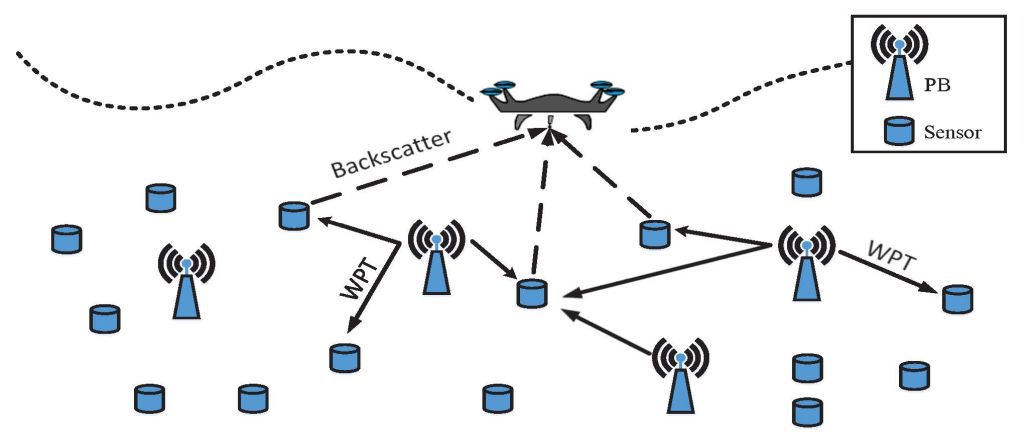
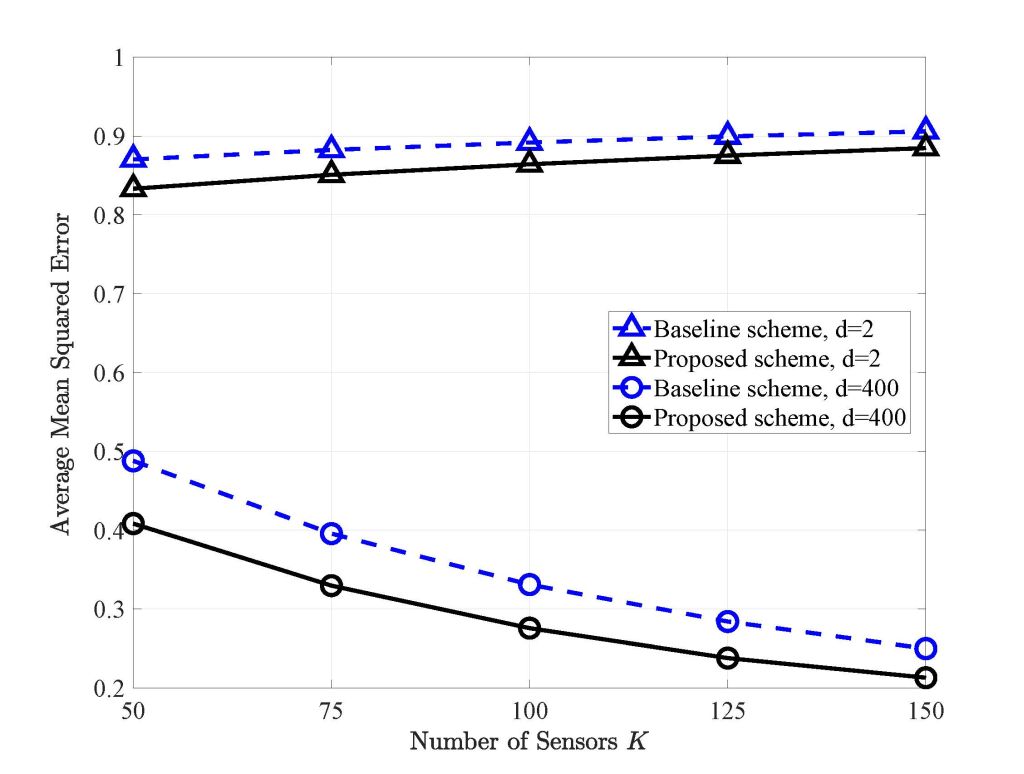
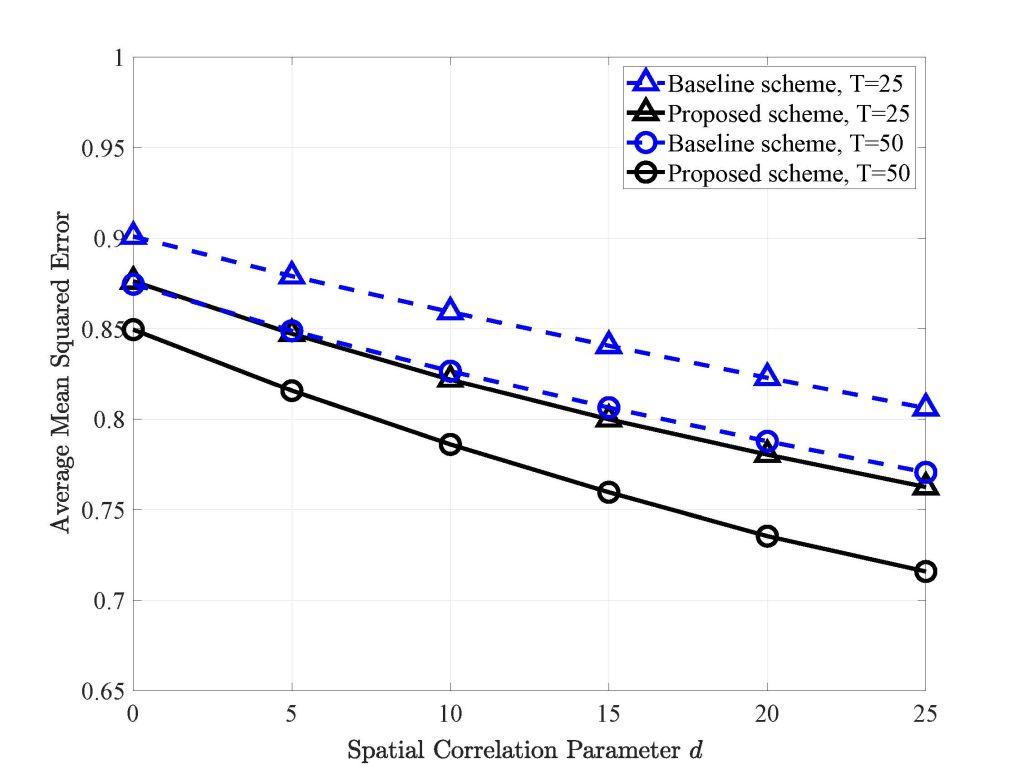
| Summary | We studied a data-gathering problem for a backscattering wireless sensor network with the help of an unmanned aerial vehicle (UAV). The trajectory of the UAV is designed to improve data collection quality under a strict deadline constraint. The UAV trajectory and sensor activation are alternatively updated to find the optimal UAV trajectory to minimizing the mean square error of the reconstruct data. |
||
| Scientific Breakthrough | Using unmanned aerial vehicles (UAVs) as data-gathering node provides a more flexible trajectory design compared to ground data-gather. The data collection quality can be improved with potential line-of-sight communication between sensors and UAVs. Moreover, with the help of power beacon and backscatter communication, the energy consumption of sensors can be reduced to prolong their life time. |
||
| Industrial Applicability | The UAV system provides high deployment flexibility and the propose trajectory design with sensor activation control can be used in the WSN for environmental monitoring or agricultural applications. For example, for forest fire monitoring, UAV system reduces the collection overhead and the UAVs can be remotely controlled to avoid any possible risk for data collection. Also, the reconstruction quality for environmental monitoring is improved. |
||
| Keyword | UAV data-gathering trajectory design wireless power transfer power beacon data reconstruction wireless sensor network minimizing mean square error data correlation transmit scheduling | ||
- ywhong@ee.nthu.edu.tw
other people also saw