



| Technical Name | Critical Equilibrium Device for Controlling Bridge Deformation and Method | ||
|---|---|---|---|
| Project Operator | National Chi Nan University | ||
| Project Host | 施明祥 | ||
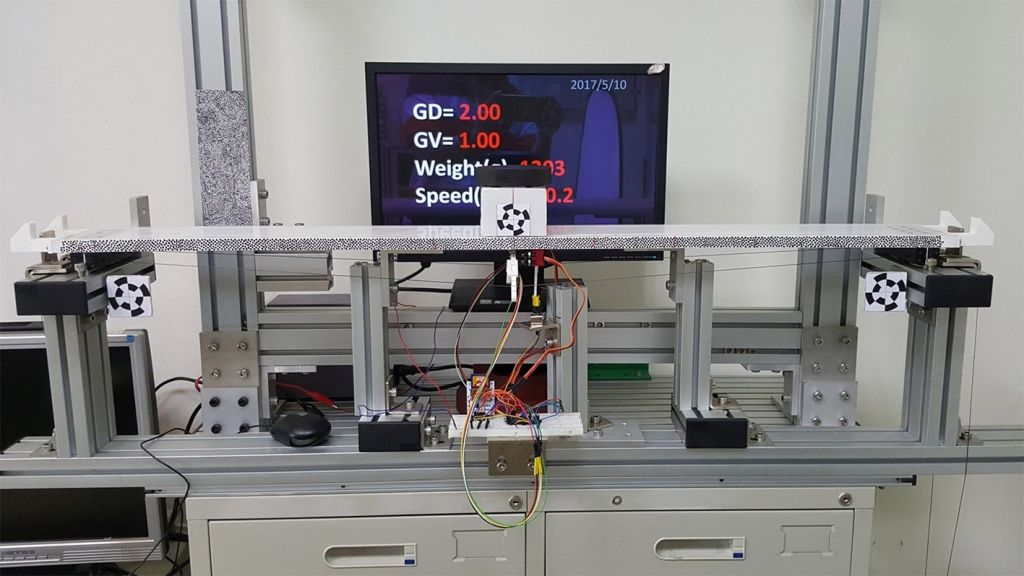
| Summary | When natural disasters cause bridges to collapse, the delivery of rescue equipment and supplies to remote disaster areas is impeded and disaster relief efforts are thus delayed. A Critical equilibrium device is proposed to adjust the internal force of the bridge and reduce the deformation of the bridge. It is installed at bridge to form a virtual pier and promote the span of bridge. |
||
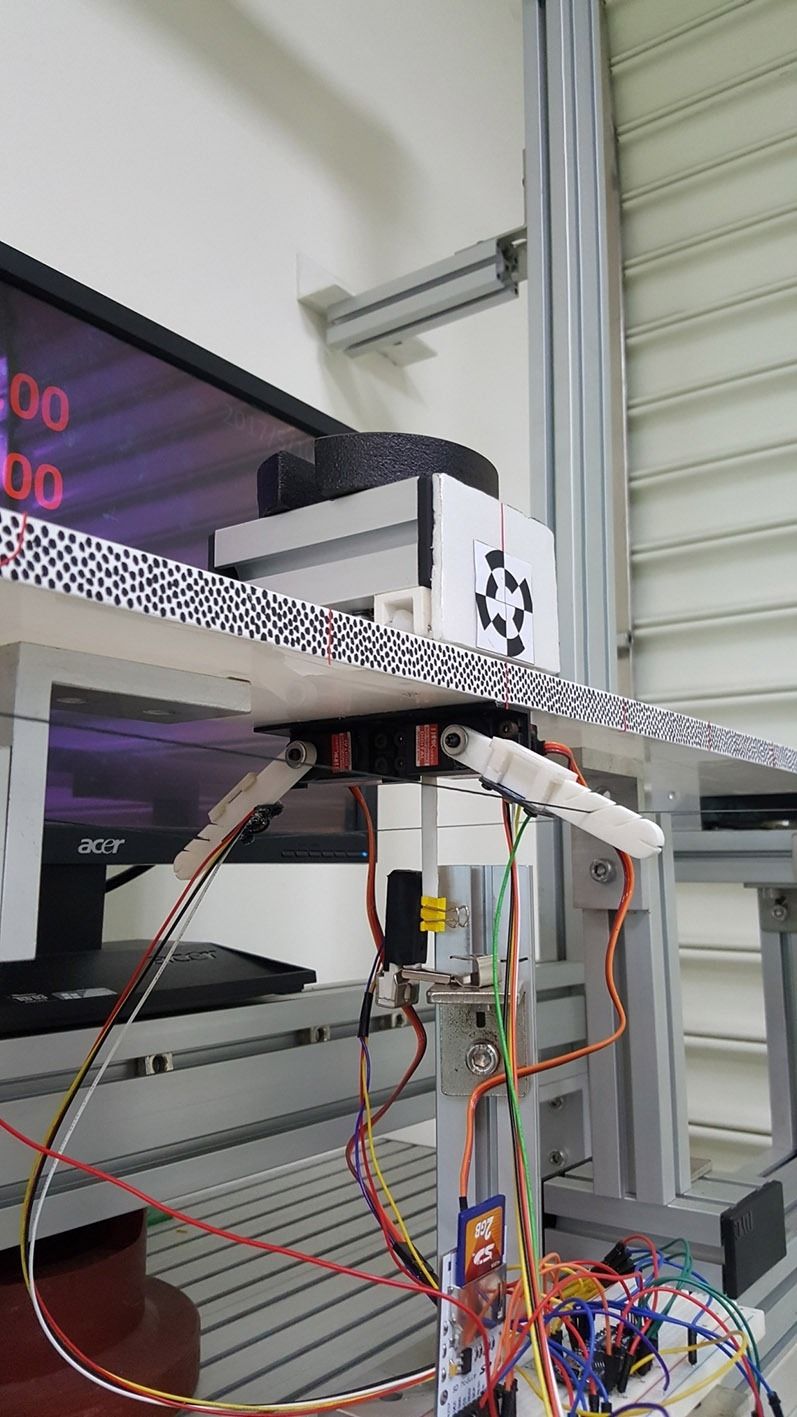
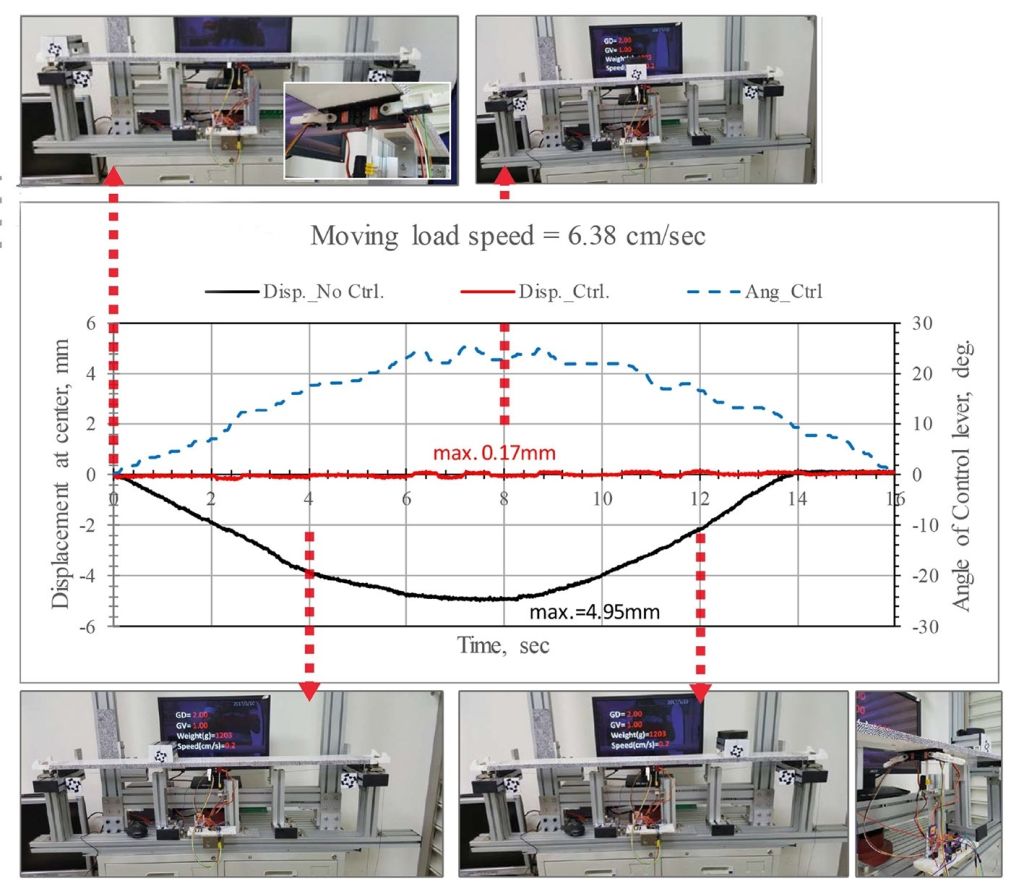
| Scientific Breakthrough | This device performs that: The rotation angle of cantilever arm can be rotated by RC servo to appropriate angles to provide adequate upwards resultant force to balance the moving load. The maximum vertical displacement of a bridge with CED can be controlled to far below 1/400 of the span of bridge. The effective span of a bridge can be increased without increasing the depth of the cross-section. |
||
| Industrial Applicability | In response to the challenges of various construction environments, the present invention breaks through the limitations of the construction environment. Light materials can be used in this technology to build lightweight bridges, design and construction of landscape bridge, emergency relief bridges, etc. Improved technology can also be developed for the tool machine industry to reduce the impact of flutter to stabilize the machine. |
||
| Keyword | Critical Equilibrium device virtual pier upwards resultant force Radio-Controlled servo light material rotation cantilever arm relief bridge landscape bridge smart control tool machine | ||
- iloveaachen@gmail.com
other people also saw