



| Technical Name | The design and Implementation of a family service robot with the abilities of 3D indoor modeling, auto navigation, multiple rooms access and map fusion | ||
|---|---|---|---|
| Project Operator | National Formosa University | ||
| Project Host | 李政道 | ||
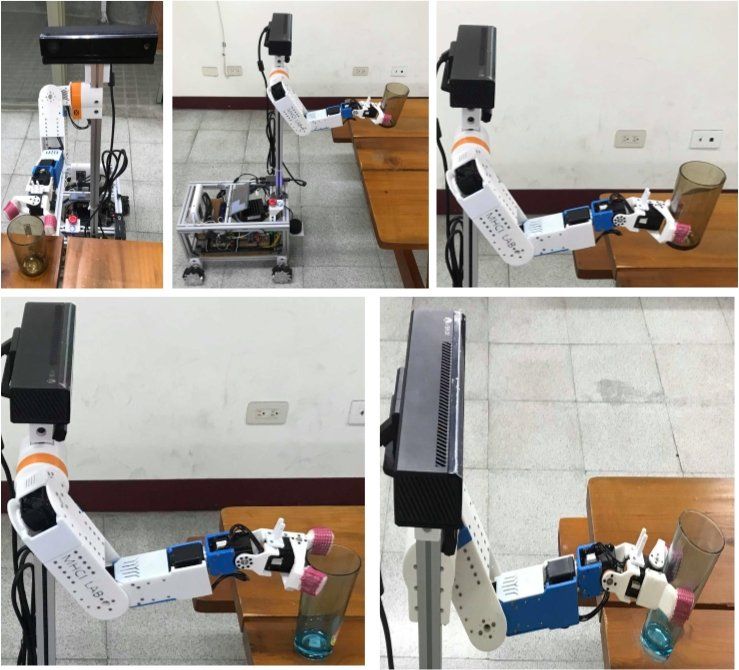
| Summary | The robot could open/close door autonomously with the technology of multi-rooms map fusion. The universal home service robots could follow users voice command to operate the electric switch, transfer objects and have a conversation with users. It is worth noting that the key components in this study will be made by ourselves to improve the skill of robot implement in Taiwan. |
||
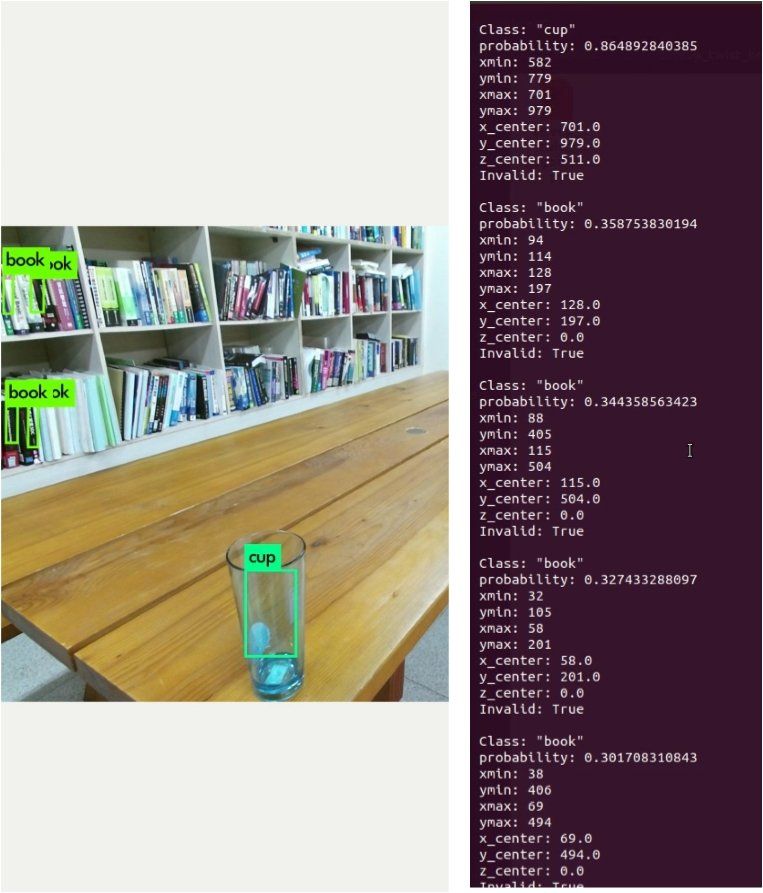
| Scientific Breakthrough | With the use of ROS, the robot could identify object with AI technology, and also accept voice command, and walking in a house automatically to reach the object. |
||
| Industrial Applicability | With the use of ROS, the robot could identify object with AI technology, and also accept voice command, and walking in a house automatically to reach the object. In the home service robot area, this is a significant improvement. |
||
| Keyword | Home service roobt autonomous door operation indoor modeling map fusion, line-type Lidar robot arm ROS multiple room access deep sensor AI identify | ||
- kuoyichen@nfu.edu.tw
other people also saw