



| Technical Name | Integrated Sensing, NavigationAI Accelerator Chip Technologies for Intelligent Autonomous Mover in People Rich Environments | ||
|---|---|---|---|
| Project Operator | National Chung Hsing University | ||
| Project Host | 范志鵬 | ||
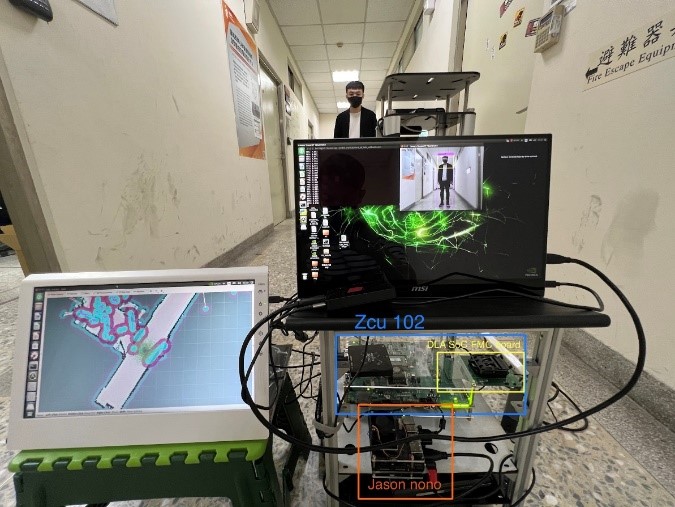
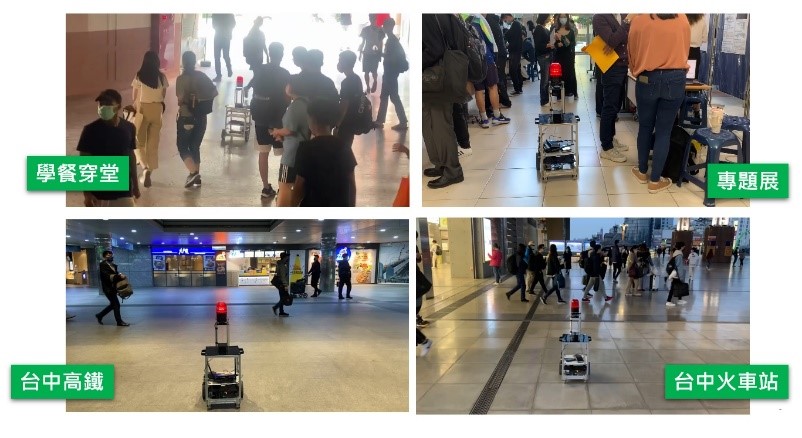
| Summary | This technology provides a total solution on sensing, navigation, positioningedge computing for autonomous movers aiming at services in people rich environments. Its sensingnavigation techniques support image-based object classificationbehavior/path predictions of surrounding people to facilitate social norm aware movement. Three indoor positioning schemes are bundled to enhance the robustness of localization. Dedicated AI computing chipan CNN model mapping tool are also developed to support efficient edge computing. A 4-wheeld robot powered by the developed AI ASIC + FPGA+GPU computing platformextra Lidar, ultrasound radar was built as the technology testbedverified successfully in real environments. |
||
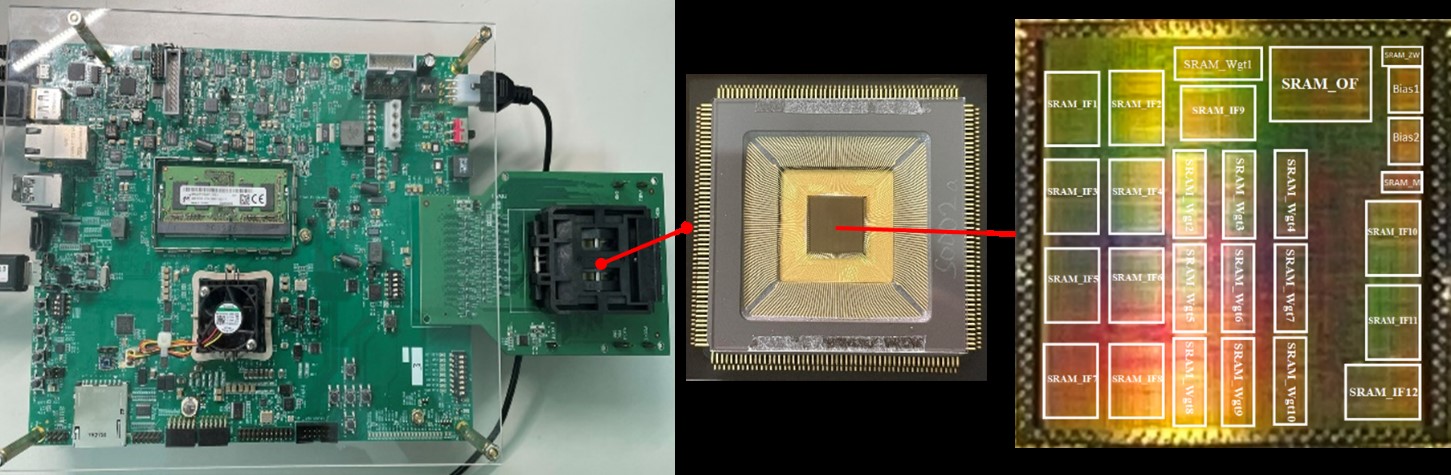
| Scientific Breakthrough | The proposed light-weight CNN model Agile v4 can achieve 90 computing complexity reduction95.26 in detection accuracy. Compared with the renowned Yolov5 model, the speed up is 12.3X in GPU implementation. Evaluation by using a composite performance index including accuracy, speedpower factors also suggests a significant performance margin. The AI acceleration chip is implemented in a 40nm process with an extensible architecture consisting of up to 2160 PEs. It can be configured to a high throughputlow power computing enginesupport module sparsity. In navigation model development, by constructing a virtual target field, the model training can be expedited in a graphical simulation engine. |
||
| Industrial Applicability | This technology bundle is tailored to applications where service robots need to operate in people rich environments such as shopping malls, exhibition centers, restaurants, hotels, hospitals, offices, traffic stationsairports. It can facilitate various service modes including autonomous movingindependent working, customer guidance,trailing for assistance. Each individual technology can also be integrated to other systems. Possible deployment examples include smart object/environment sensing for robots, intelligentinteractive advertisement board, AI assisted inspectionsoptimal movement path planning for manufacturing robots. |
||
| Keyword | AI model Image based object detection AI acceleration chip CNN model mapping Indoor positioning system Object tracking and path prediction Unmanned autonomous mover game engine simulation Heterogeneous computing platform Navigation model | ||
- Contact
- Chan Shuchi
- shuchi@dragon.nchu.edu.tw
other people also saw