:::
- 首頁
- /
- 年度
- /
- 2021
- /
- 精準健康(生技&新藥)
- /
- 室內物件偵測與軌跡預測




| 技術名稱 | 室內物件偵測與軌跡預測 | ||
|---|---|---|---|
| 計畫單位 | 逢甲大學 | ||
| 計畫主持人 | 陳冠宏 | ||
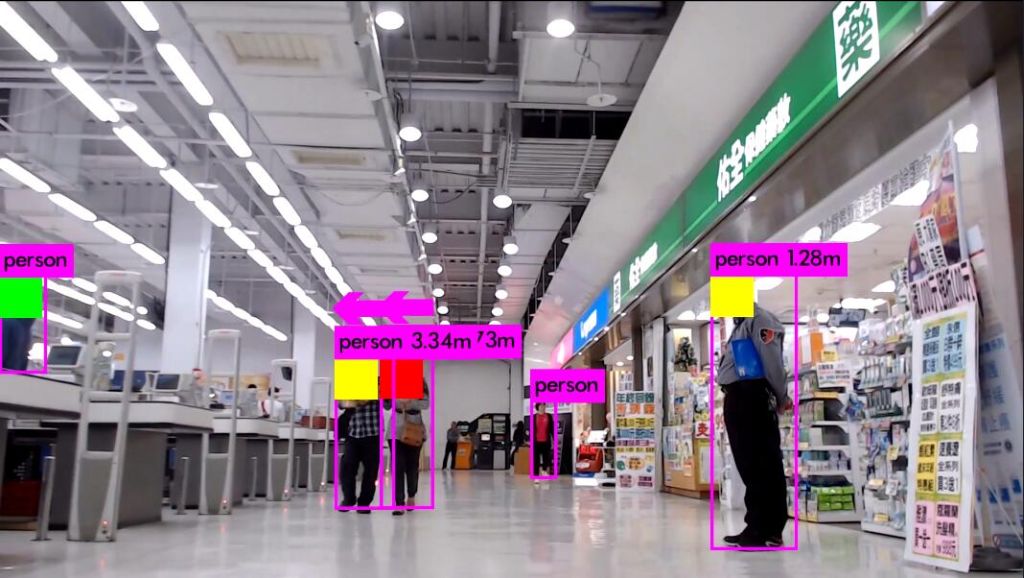
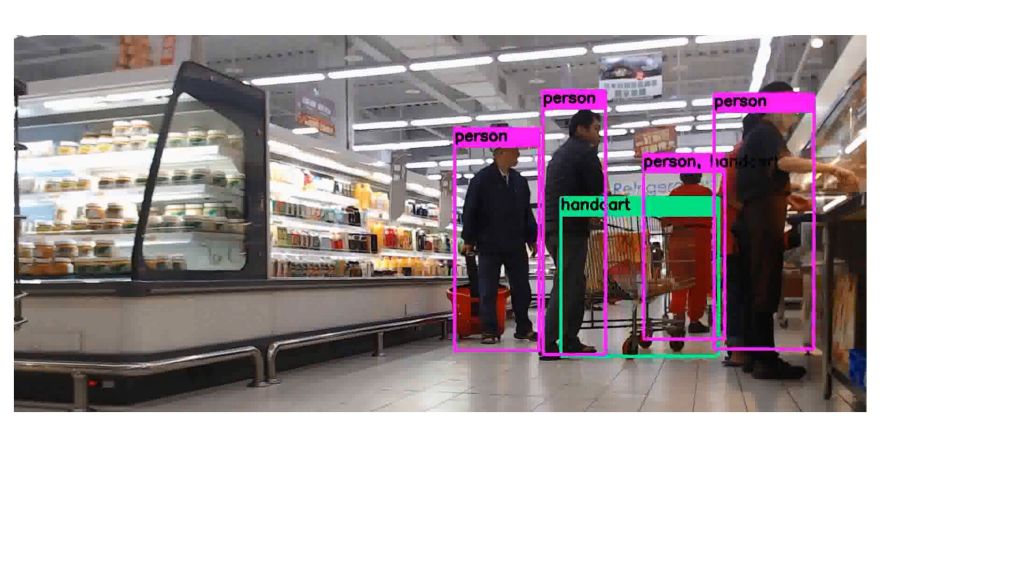
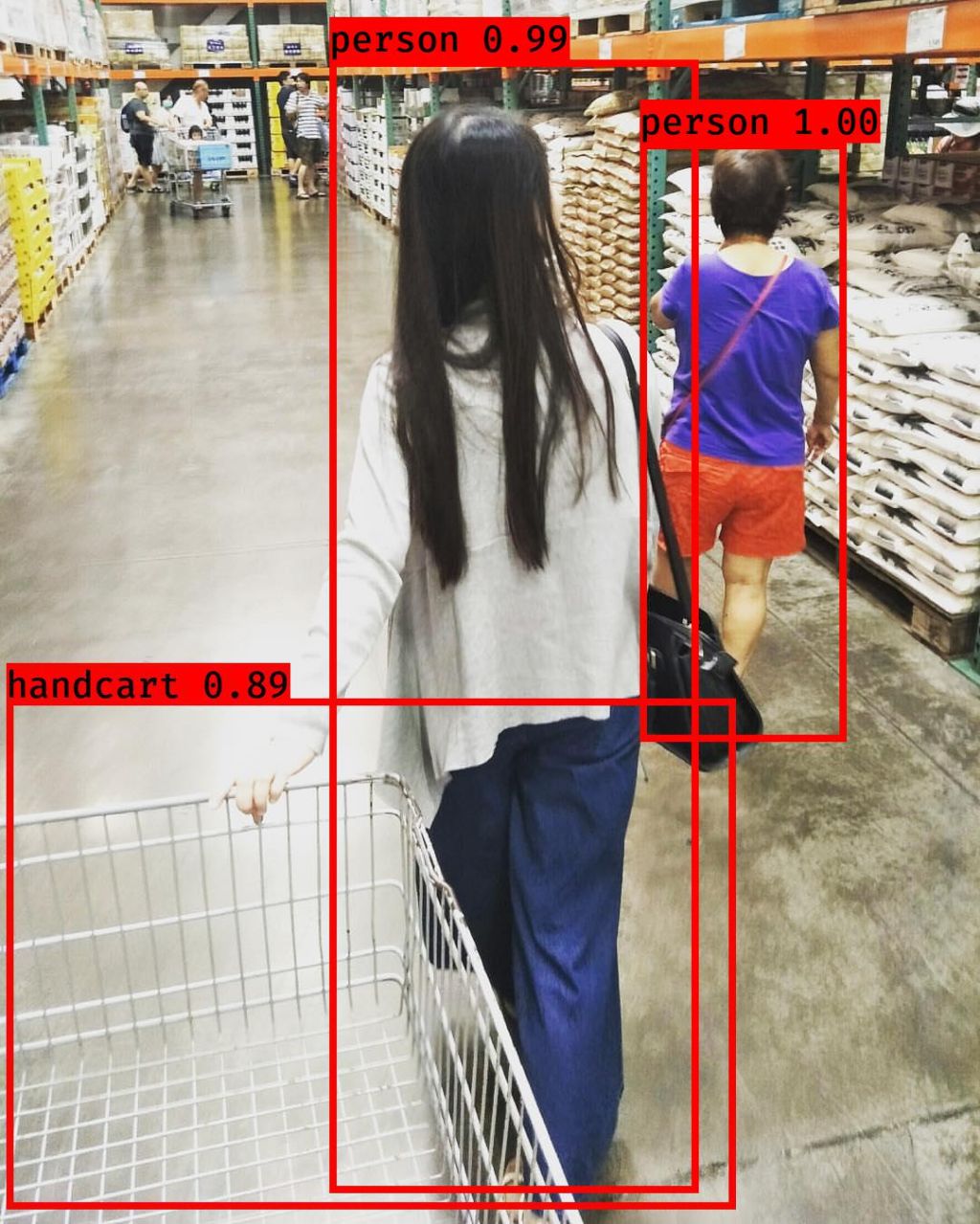
| 技術簡介 | 我們開發深度學習在以鏡頭為感測器進行物件偵測與辨識、軌跡預測之技術,提升自走式載具與行人互動的能力;另外在維持一定的準確度考量下,也將model做輕量化,可以順利執行在PYNQ-Z2上,達到即時運算的能力。 |
||
| 科學突破性 | 利用深度學習來進行室內物件偵測及軌跡預測,物件包括有行人、輪椅、購物車、汽車等。訓練模型時使用壓縮技巧,來減少參數量。我們推出Agile Model,與Tiny-Yolo相比Model Size減少97.4%,執行速度提升15FPS,於嵌入式平台TX2達到30FPS,AP可達93.5 %。 |
||
| 產業應用性 | 可提供物件偵測、軌跡預測及距離資訊,具防撞警示功能,方便運用在自駕車、自動農場設備、無人機等;或推廣至辨識生產線產品瑕疵、監控零組件或機台設備運作及故障警示;另可遠端判斷設備維修需求、城市與機場的公共安全、智能家居監控和安保。 |
||
| 關鍵字 | 三維深度卷積類神經網路 行人行為分析 深度卷積類神經網路 深度學習 終端邊際運算 高階層合成技術 物件偵測與辨識 PYNQ 軌跡預測 先進駕駛輔助系統 | ||
- 聯絡人
- 謝瑞民
- 電子信箱
- dmshien@gmail.com
其他人也看了