



| 技術名稱 | 具動作平滑化之深度強化式學習技術與運⽤其於⾃駕模型賽⾞駕駛應⽤ | ||
|---|---|---|---|
| 計畫單位 | 國立陽明交通大學 | ||
| 計畫主持人 | 吳毅成 | ||
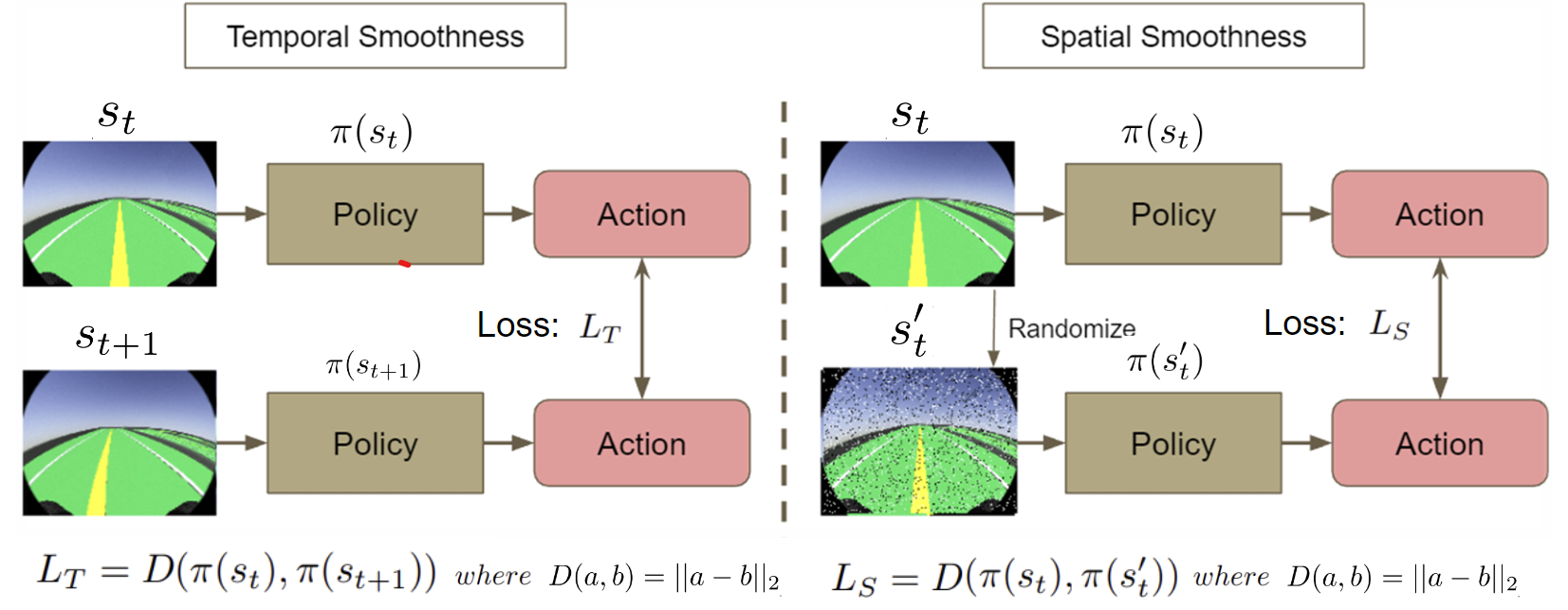
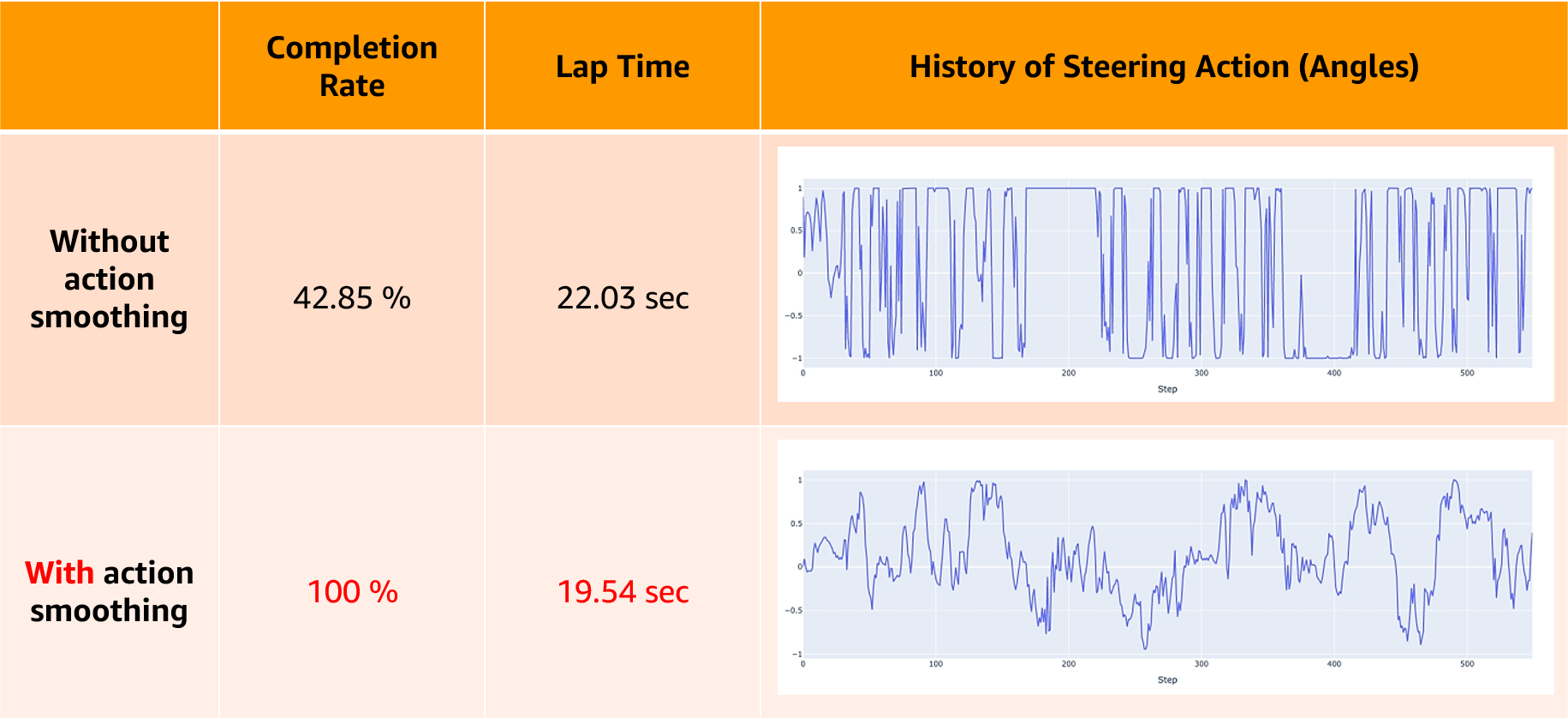
| 技術簡介 | 我們提出的虛實轉移技術(sim-to-real)利用生成對抗模型CycleGAN進行虛擬-現實影像風格轉換,縮減純視覺自駕模型賽車的虛實差異。同時通過提高時序相鄰動作的連續性,實現了DRL模型輸出動作的平滑化(action smoothness)。這些方法的結合成功提高了實體賽車的運行速度和穩定度。 |
||
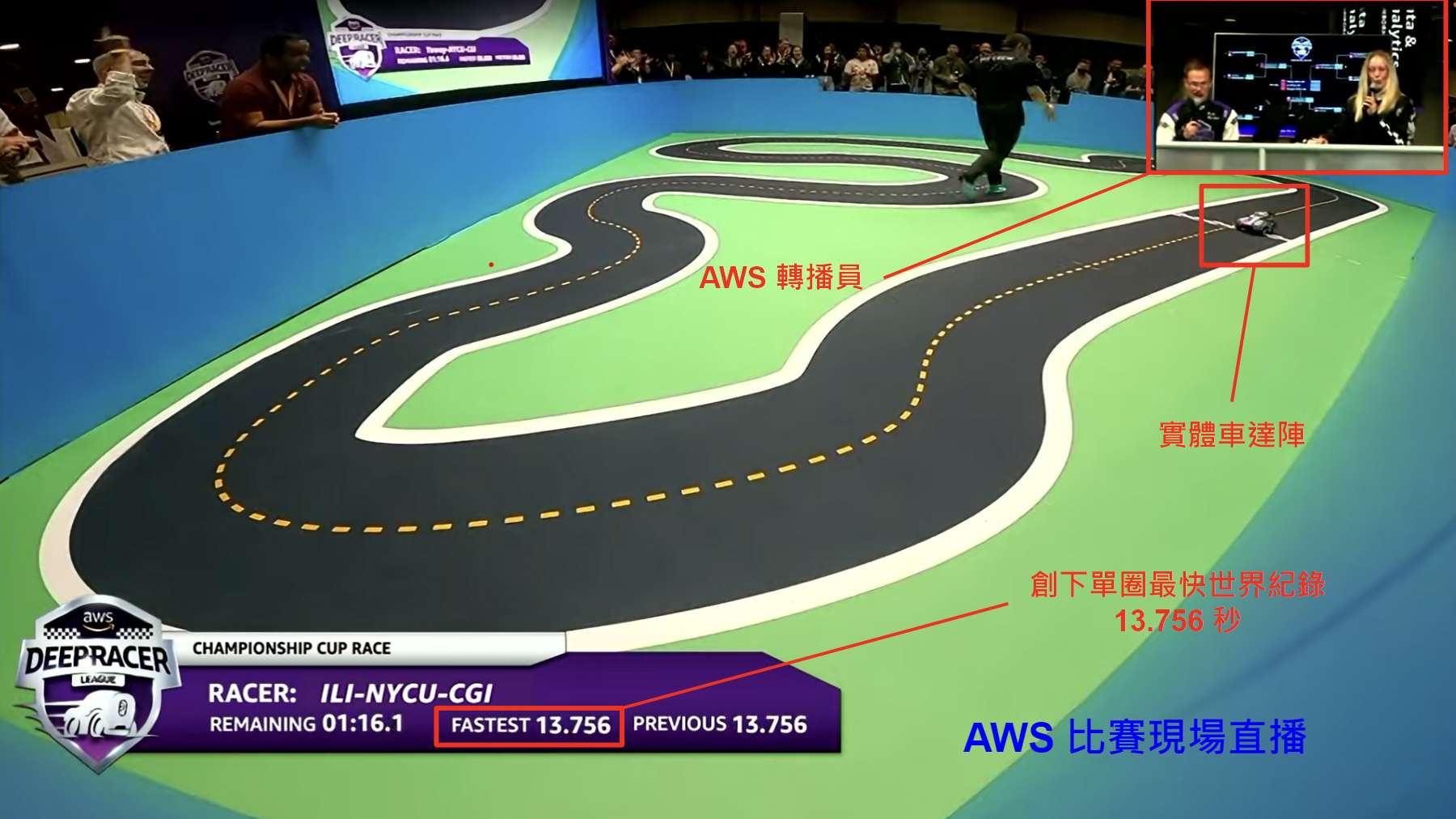
| 科學突破性 | 本團隊提出虛實轉移技術和動作平滑化方法,分別克服DRL自駕模型賽車中虛實環境差異和控制穩定度等問題,顯著提升在真實環境中的行駛表現。此技術於2022年發表於國際頂尖會議ICRA、IJCAI Workshop,並於AWS DeepRacer自駕模型賽車競賽中榮獲全球前三名的成績(總參賽達15萬人次)。 |
||
| 產業應用性 | 我們的虛實轉移技術和動作平滑化方法有助於提高DRL於真實應用問題的可行性,為真實世界之機器人、機器手臂和無人機控制上帶來更多可能性。此外,本技術除了可應用於各大模型自駕車賽事之外,也可用於工廠內的無人搬運車、高風險環境(如崎嶇路面等)之救災探勘等,達到低成本、快速部署的目的。 |
||
| 關鍵字 | 深度強化式學習 深度學習網路 自駕模型賽車 虛實轉換 端到端學習 柔性演員評價者 動作策略平滑化 循環生成對抗網路 | ||
- 聯絡人
- 柯月卿
- 電子信箱
- cindyko@nycu.edu.tw
其他人也看了