



| Technical Name | RobustAutonomous UAVs Navigation for Accurate Road Following | ||
|---|---|---|---|
| Project Operator | National Yang Ming Chiao Tung University | ||
| Project Host | 劉吉軒 | ||
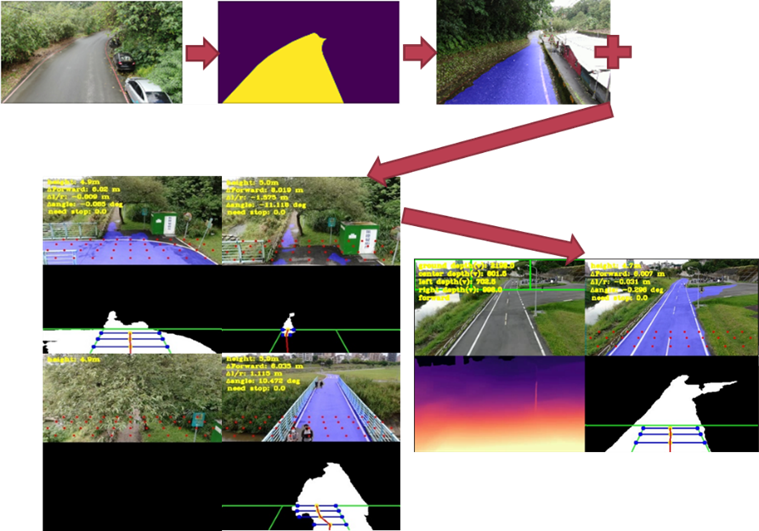
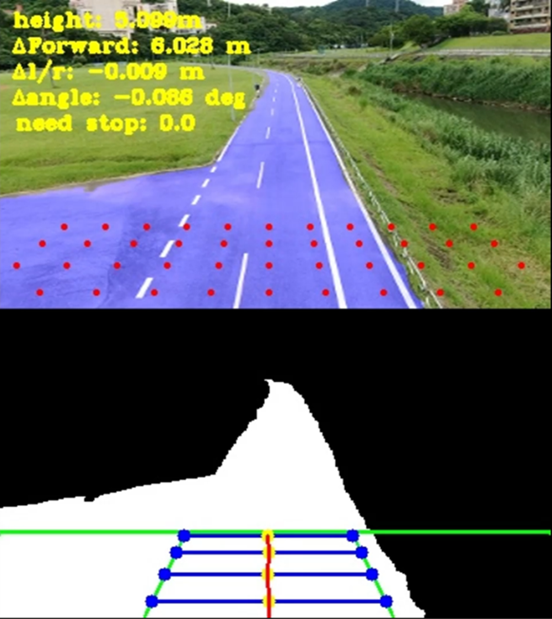
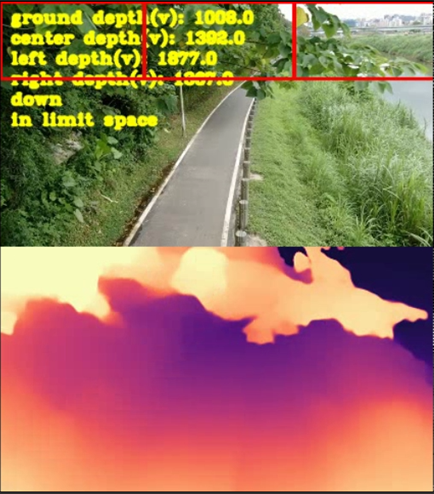
| Summary | This technology provides robust AI navigation for autonomous UAV road following with visual perceptionwithout GPS. Capabilities of obstacle avoidancecorrective recovery are also developed. The UAV can detectavoid tree branches (as well as bridges) along the road. When the end of the road is encountered, the UAV can also retreat back to the last road junctionresume following the alternative road. This technology has been successfully field tested for several times over a road distance of 1 kilometer. |
||
| Scientific Breakthrough | The major problem of current road following techniques is the lack of robustness, incapable of dealing with complex road situations in the real-world environment. Our technology integrates several functional modulesincorporates logical decision-making mechanism. Adaptive responses to various situations are designed into the autonomous control architecture, therefore, providing sufficient robustness. Performance advances are shown in following accuracy, visual perception effectiveness, tolerance to road composition, obstacle avoidance appropriateness,real-world validation. |
||
| Industrial Applicability | Current UAV applications are mostly remote controlled by human pilotsby GPS waypoints. However, for road inspection applications, these two control modes are unable to provide adequate navigation accuracyflight safety. Our technology is capable of autonomousaccurate road following for various road conditions with obstacle avoidance. This represents a major breakthrough for industrial use of UAV road inspection applications. Market value of UAV applications in public road safety inspectionenvironmental protection is also expected to expand. |
||
| Keyword | UAV application autonomous navigation control road following road inspection obstacle avoidance spatial information model road semantic segmentation depth information prediction navigation path planning robust AI control system | ||
- Contact
- Gong-Yi Lee
- james88385542@gmail.com
other people also saw