





| Technical Name | Design Virtual Reality-based Fish Scooping MissionHaptic Feedback Device Applying to Clinical Balance Training | ||
|---|---|---|---|
| Project Operator | National Cheng Kung University Hierarchical Green-Energy Materials (Hi-GEM) Research Center | ||
| Project Host | 陳建旭、林彥呈、陳建富 | ||
| Summary | This virtual reality fish scooping task is used with a tactile feedback device for clinical balance training. Balance training usually needs to guide users to perform various body movements in the spaceadjust the difficulty according to the situation. The positioning technology of virtual reality can Accurately locate the user's body movementsgive interactive tasks. The haptic feedback device can provide resistance from different directions at different anglesheights through the rotation of the rotor. |
||
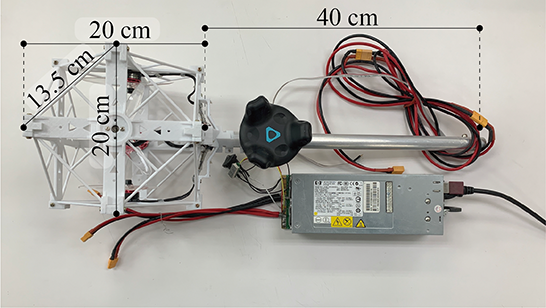
| Scientific Breakthrough | The breakthrough of this technology is the propeller control method proposed by the team. As a force feedback device, the bellows is composed of three components: (1) propeller blades (2) DC brushless motor (3) Electronic Speed Controller. The parameters that can be controlled are the DC brushless motor's rotation speedrotation time. There are at most six directions of force that can be controlled so that it can generate a variety of force feedback combinations. In addition, it can be combined with different handles. The holding method's design can simulate various force feedback modes, such as the force simulation of shaking pots, the twisting of animals holding pets,the fishing activities in night markets. |
||
| Industrial Applicability | The target application of this technology is the health promotion industry. Presently, the force feedback devices used in health promotionrehabilitation only provide vibration feedback. The most common physical activity promotion systems use cameras to capture motion. Along with the evolution of technology, the price of consumer products with accurate motion capture functions is falling. Through the force feedback device of this system, the sense of immersion is increased,it can also effectively improve users' motivation. In the new normal, telemedicine is gradually accepted by the public. We believe that the trend of telemedicine will be popularized among the elderly, long-term care,community centers. |
||
| Keyword | virtual reality haptic feedback human computer interaction balance training rehabilitation for elders game for health shifting of center of mass health promotion game design | ||
- Contact
- Rita Kuo
- ritakuo@gs.ncku.edu.tw
other people also saw