



| 技術名稱 | 運用3D列印開發含纖維軟性機器人應用於微型手術 | ||
|---|---|---|---|
| 計畫單位 | 國立中正大學 | ||
| 計畫主持人 | 劉德騏 | ||
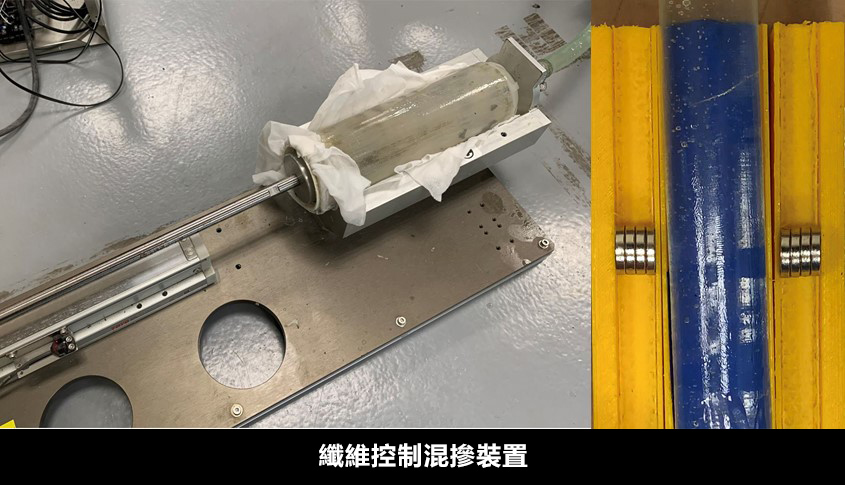
| 技術簡介 | 為提升軟性機器人未來在微創手術上的應用,採用自主研發的液態軟材3D列印機,3D列印將可大幅提高單一結構內的設計靈活性,另也在軟性材料中混摻對人體無害的植物性纖維,搭配分析軟體COMSOL,決定纖維填充率與排向對活動力量的影響,並優化傳感器集成的內部結構設計,提升醫師對其軟體機器人的最佳醫療手術體驗。 |
||
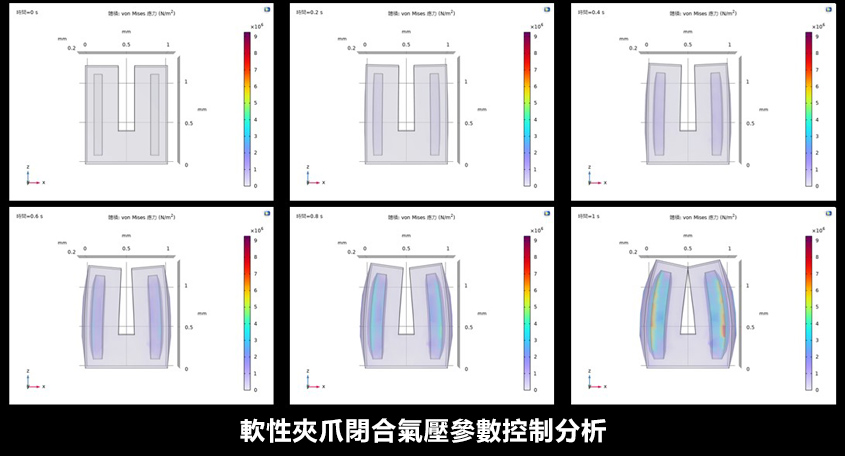
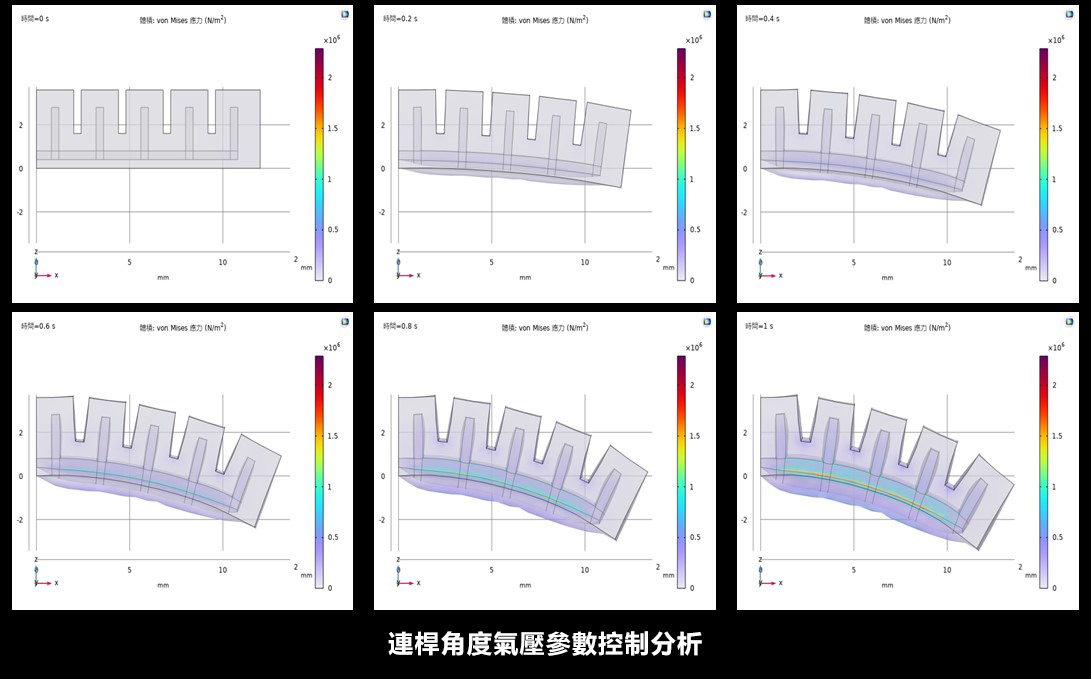
| 科學突破性 | 分析等方式,降低軟性機器人強度與支撐性的缺點。目前結構靈活性控制可達0-90度的全向彎曲符合目前各項研究的標準,在控制驅動角度精度上可達到正負0.2mm的誤差,自主研發的一液態軟材3D列印機,單片最薄設計可到1mm厚度,內部最小口徑可達0.2mm。 |
||
| 產業應用性 | 生物醫學與精準醫療就是軟性機器人未來大幅成長的使用領域的主要產業。從軟性可穿戴機器人、軟性假肢、協作機器人(與人類夥伴合作的輔助機器人)等大型機器人,到用於野外探索、藥物輸送、醫療植入物的小型化機器人,軟體機器人的應用數量在醫療領域非常廣闊,現由於老齡化的時代,此種產品產業價值非常高。 |
||
| 關鍵字 | 3D列印 軟性機器人 微創手術 植物纖維 纖維排向 | ||
- 聯絡人
- 陳自豪
- 電子信箱
- d97420010@gmail.com
其他人也看了