




| Technical Name | Real-time boat and marine debris detection and recognition on edge devices | ||
|---|---|---|---|
| Project Operator | National Taiwan Ocean University | ||
| Project Host | 謝君偉 | ||
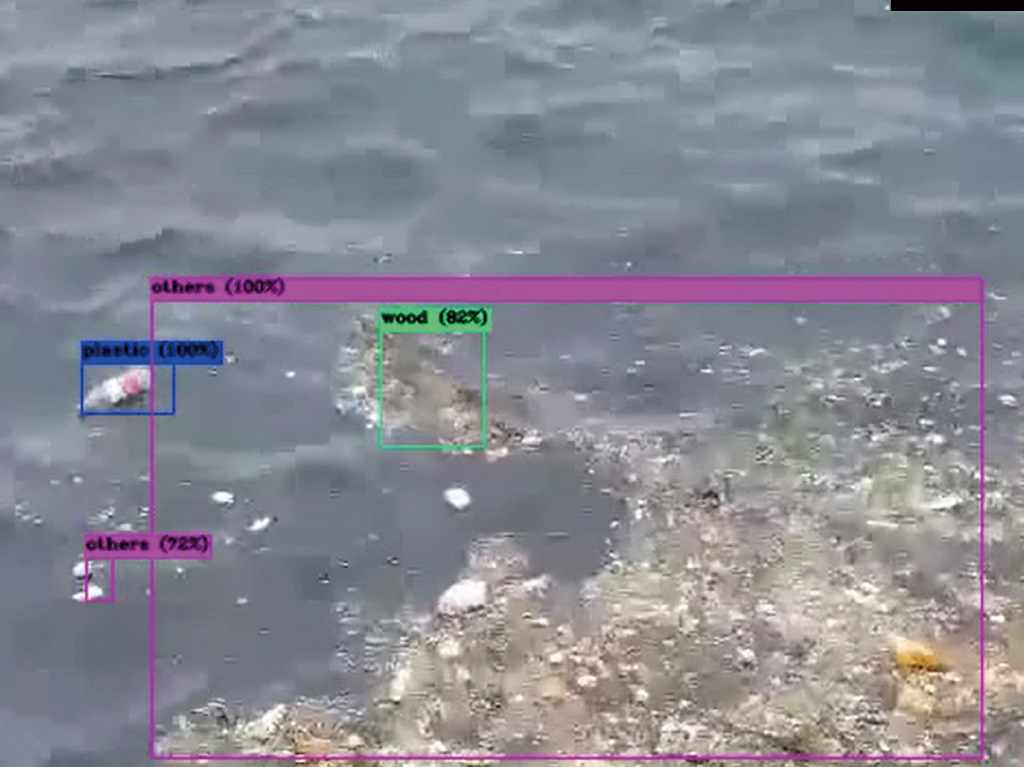
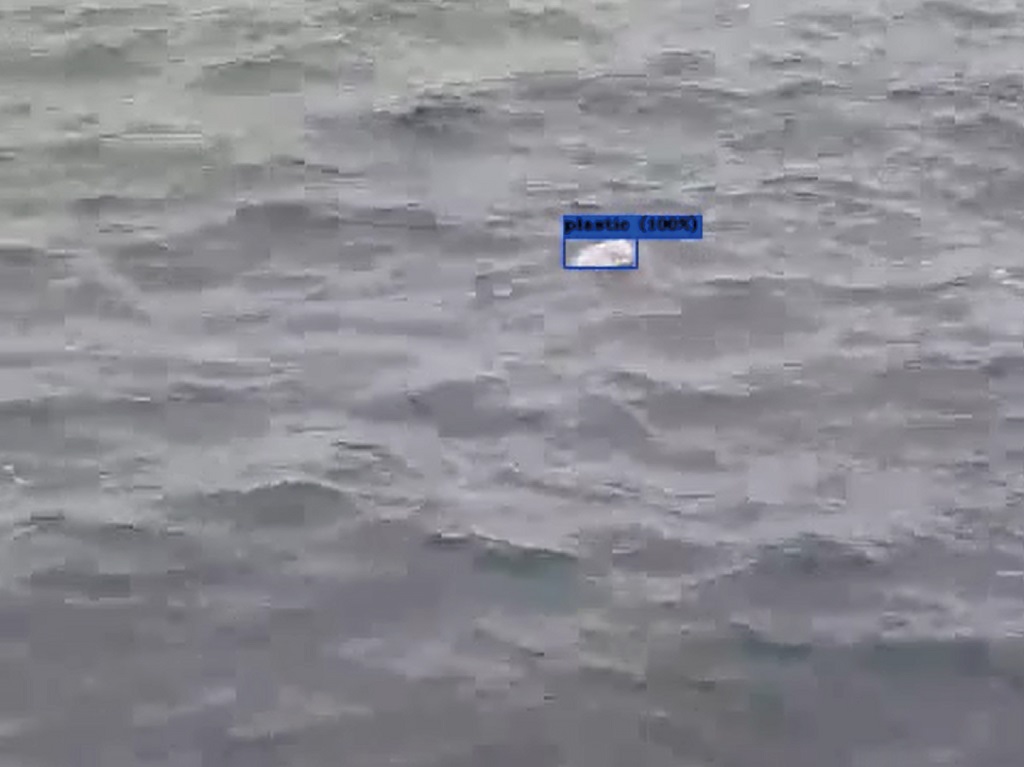
| Summary | This project plans to develop a real-time deep learning algorithm for boat and marine debris detection based on edge computing devices. In some fixed ports, the system can automatically detect and recognize boats and marine debris according to their types, then sends their information and locations for further warning and recording. The trained model can inference objects based on only edge devices with extremely efficiency. With the system, a lot of human efforts efforts can be saved to that the efficiency of existing dispatching environmental protection can be much improved. |
||
| Scientific Breakthrough | This technology can be divided into two part; that is, deep learning detection and tracking. For object detection, we develop a novel ReCoreNet architecture for extremely small object detection. After detection, the Kalman filter is adopted to predict each target to minimize the errors of detection. Moreover, the locations of boat and marine debris can be sent and integrated into the GIS map. |
||
| Industrial Applicability | This technology can cooperate with local governments to develop edge computing for marine debris identity engine. After accurately detect and track the location of marine debris, the information will upload on GIS map to protect marine environmental effectively. |
||
| Keyword | Deep learning AI Real-time Tiny model Small object detection Object tracking GIS Marine debris detection edge computing devices | ||
- ribon0709@gmail.com
other people also saw