




| 技術名稱 | 自駕車之機器學習軟體系統 | ||
|---|---|---|---|
| 計畫單位 | 國立清華大學 | ||
| 計畫主持人 | 劉晉良 | ||
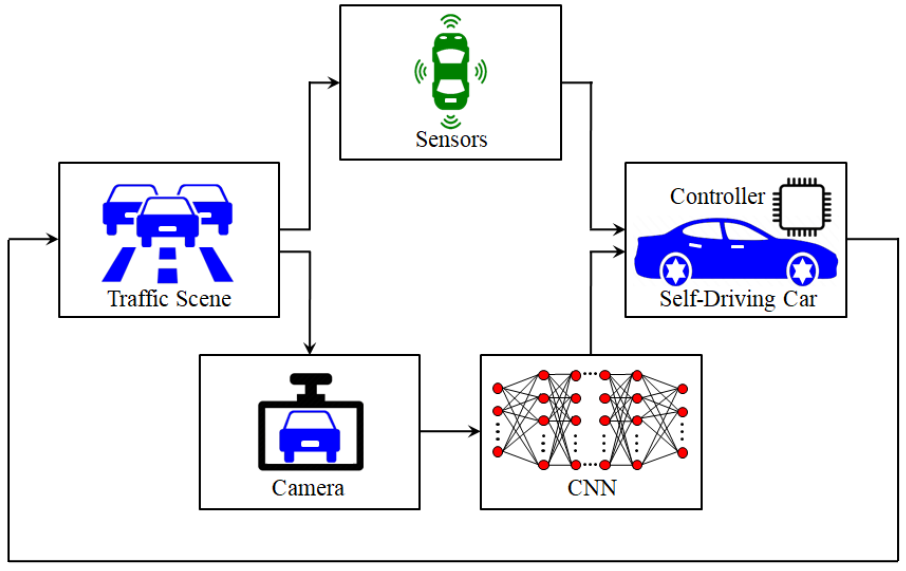
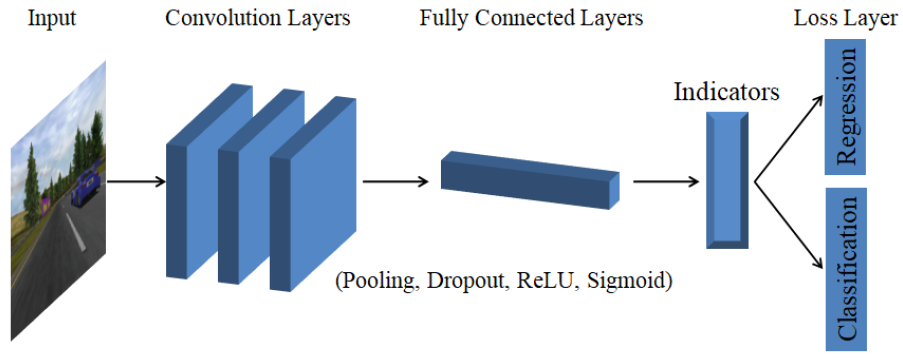
| 技術簡介 | 我們開發一套端到端機器學習軟體系統,該系統包括(1)用於多種學習與多種駕駛任務之深度學習模型(DNN-MT),該模型以相機影像為輸入,利用各種深度神經網絡來預測感知指標以供自駕決策,(2)控制器演算法,該法使用DNN所預測之感知指標與汽車的雷達數據可達零碰撞,(3)在動態推論準確性、計算複雜性、運算速度指標上對不同DNN進行全面比較,(4)可獲最佳(新穎)自主駕駛模型。我們已建構100萬張模擬器、2TB美國道路、及27.7GB台灣道路等交通影像數據,並正將我們的演算法部署到車用感知和控制設備中,使其在台灣道路上自動駕駛真車。圖1展示該系統的模擬週期:(i)交通場景呈現給相機和其他車用感測器,分別產生影像和其他交通數據,(ii)影像輸入DNN中產生駕駛指標,(iii)將指標和汽車數據置入控制器中以驅動汽車,(iv)移動後,新的交通場景顯示於汽車。圖2所示的DNN-MT為多任務DNN模型,例如可同時用於估計駕駛感知指標的回歸任務和駕駛決策的分類任務。該通用模型是對不同任務的不同損失函數取最小(佳)化。它允許使用現有任務或添加新任務,因此可以在訓練和測試階段有系統地研究不同的模型,以進行清晰的比較。我們的結果顯示,該模型在推理效率和駕駛穩定性方面比早期模型表現更好。 |
||
| 科學突破性 | 提出一種端到端的機器學習模型,該模型整合多任務(MT)學習、CNN(卷積神經網絡)、與控制器演算法,可實現自駕車的高效推理和穩定駕駛。該模型還可用於在動態交通流量中分別基於CNN的大小、複雜性、準確性、運算速度、與碰撞次數等指標來評估不同CNN的推理效率和駕駛穩定性,以獲最佳(新穎)之CNN模型。 |
||
| 產業應用性 | 本系統可安裝於任何先進車種與車款,使用車輛設備、手機、網路中許多高效能軟體,達Level 2自動駕駛,亦可用於其他機器人、電子晶片、IC設計、精密機械等多元產業。具價值性:是核心技術,最具附加價值。稀缺性:稀有智財技術。難以模仿性:結合數學、人工智慧、車用電腦、程式設計、數據分析等複雜之軟體工程。 |
||
| 關鍵字 | 自動駕駛 機器學習演算法 控制演算法 人工智慧軟體系統 先進駕駛輔助系統 電子感測器 嵌入式軟體 | ||
- 聯絡人
- 劉晉良
- 電子信箱
- jinnliu@mail.nd.nthu.edu.tw
其他人也看了