



| Technical Name | Navigation Engine Design for Automated Driving Using INS/GNSS/3D LiDAR-SLAM and Integrity Assessment | ||
|---|---|---|---|
| Project Operator | National Cheng Kung University | ||
| Project Host | 江凱偉 | ||
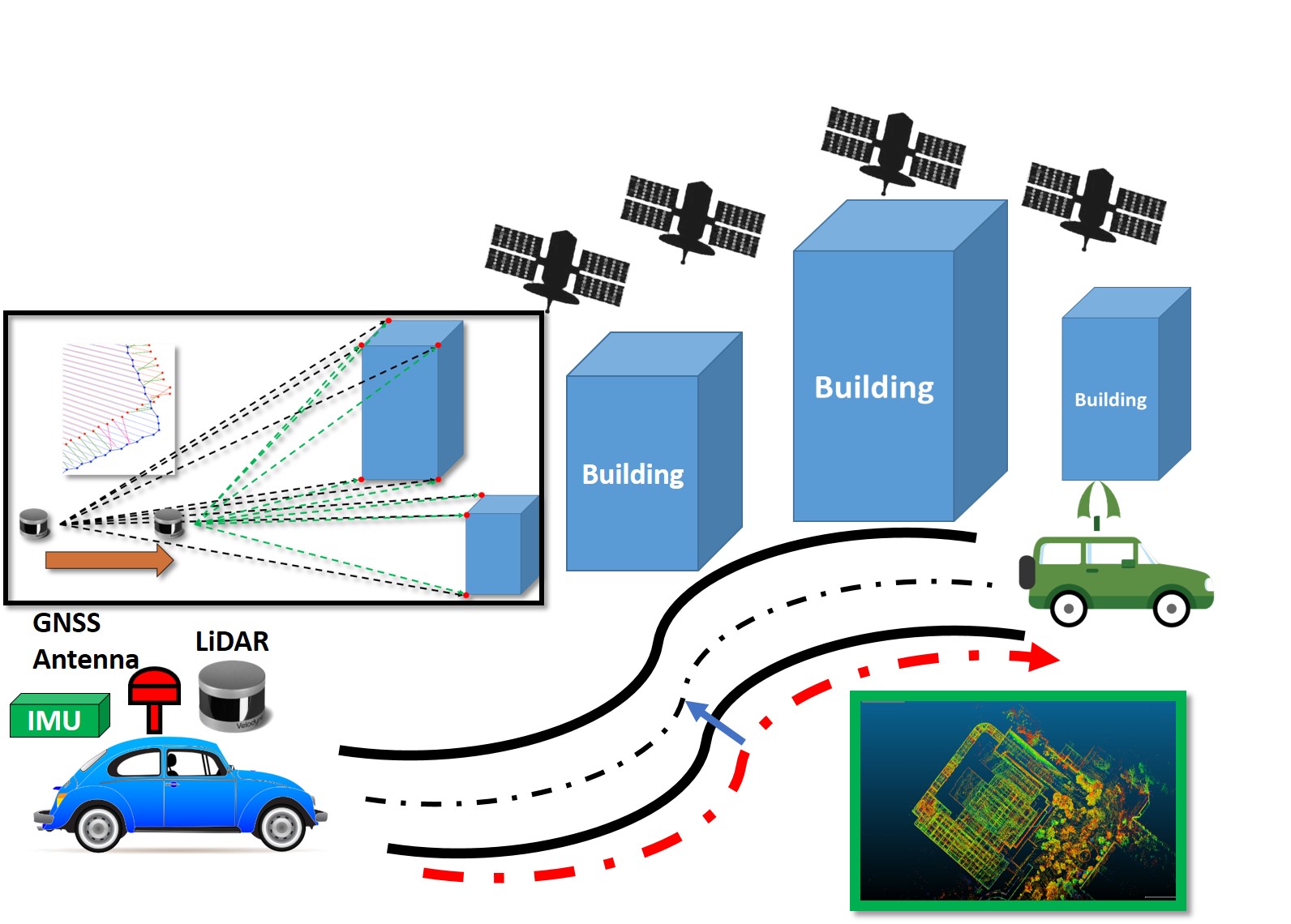
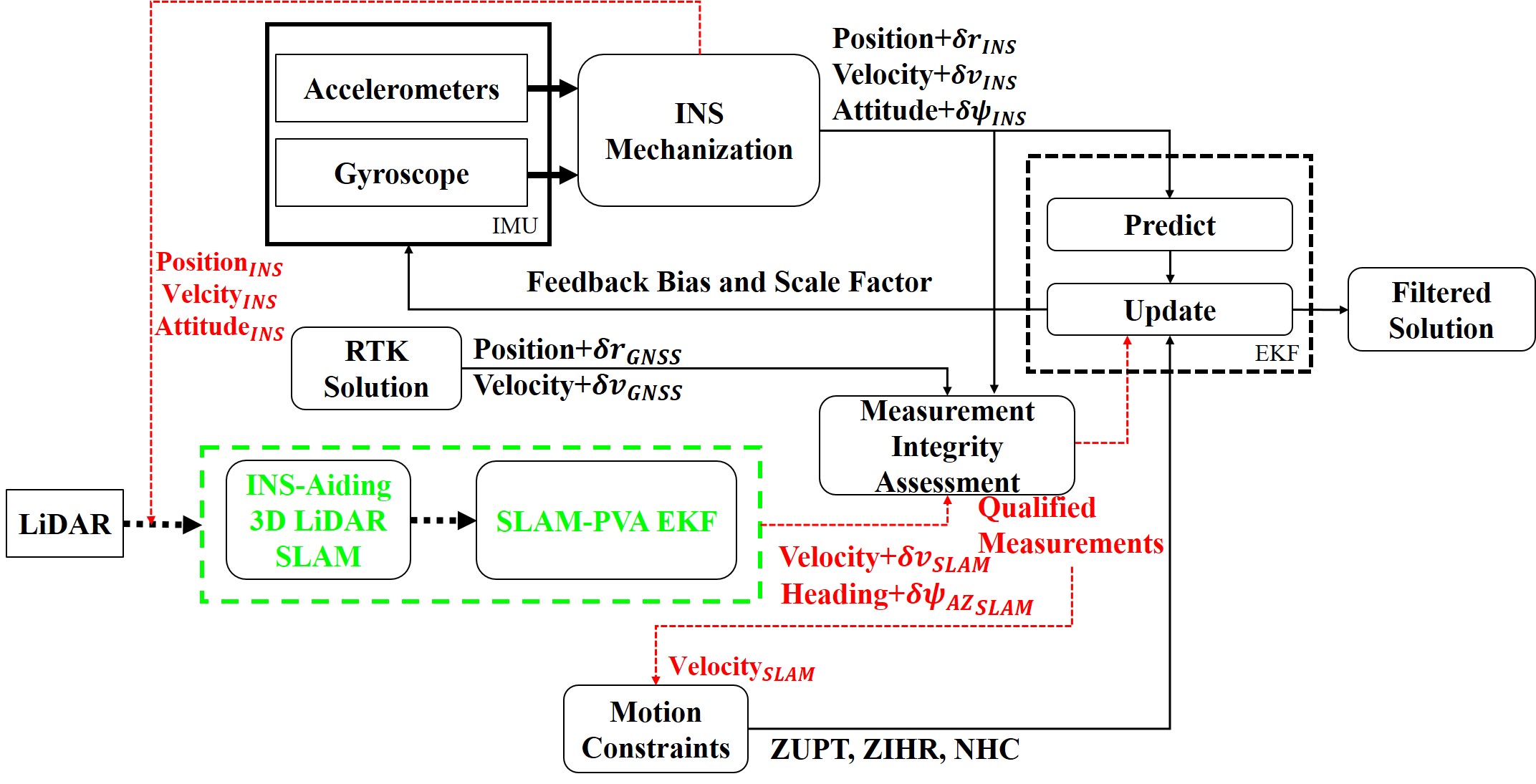
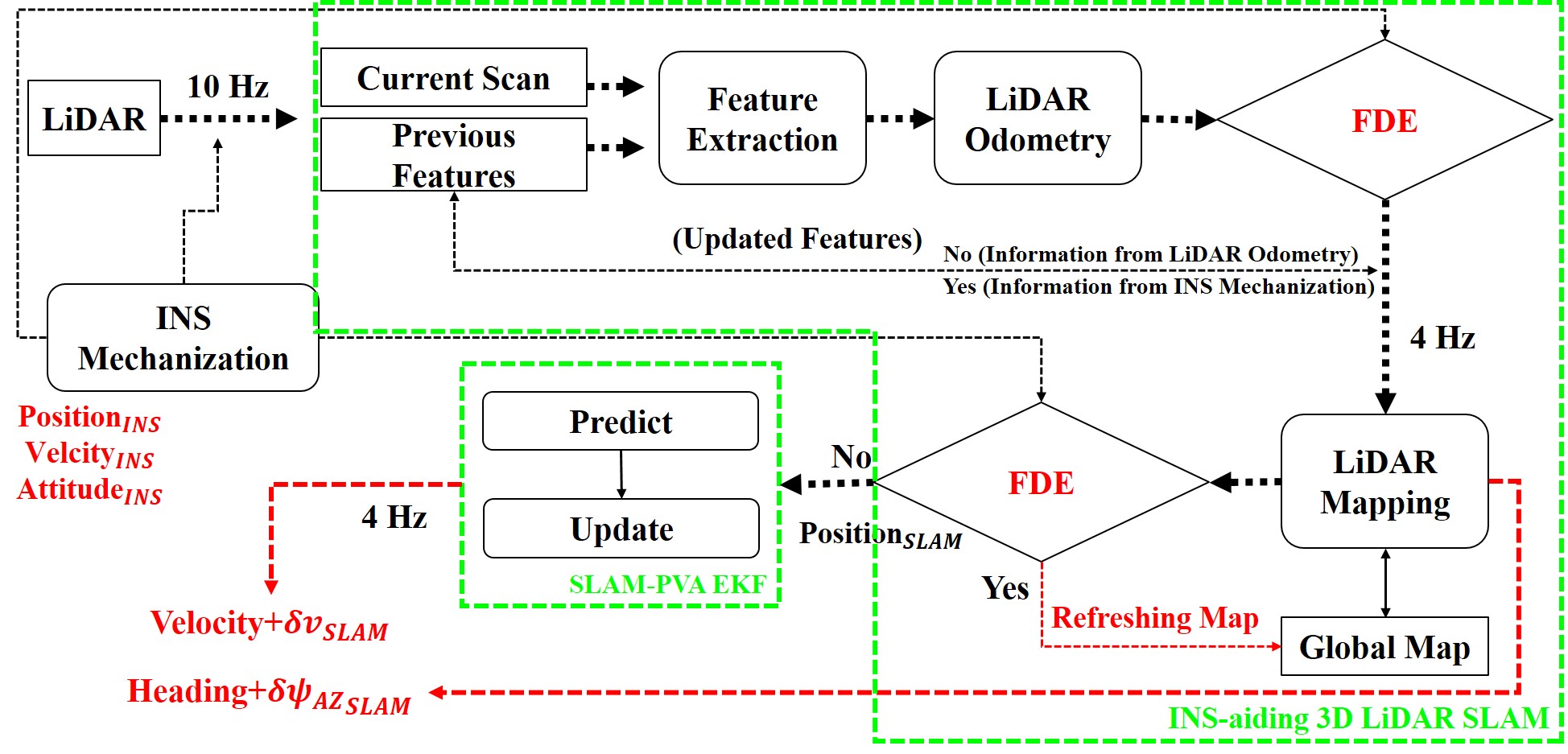
| Summary | For meeting the higher-accuracy demand, this research proposes a novel fusion design using 3D LiDAR-SLAM to provide more accurate measurements (velocity and heading). INS/GNSS with vehicle motion constraints is a conventional positioning method for obtaining the navigation solution. With the concept of the integrated system, the proposed INS-aiding 3D LiDAR SLAM uses the information from INS and generates measurements through a 3D LiDAR-SLAM extended Kalman filter (EKF), feeding into the central EKF. Instead of directly using the measurements from LiDAR-SLAM, the SLAM position velocity acceleration (PVA) model is used to deal with the high dynamic movement. Finally, the integrity assessment ensures the reliability of each measurement. This process can be further applied to use velocity for detecting the vehicle motion and applying motion constraints such as nonholonomic constraint (NHC), zero velocity update (ZUPT), and zero integrated heading rate (ZIHR). |
||
| Scientific Breakthrough | This research proposes an improved fusion algorithm, mainly concentrating on the integration of INS, GNSS, and LiDAR SLAM. The contributions of this research are given as follows. 1) The first contribution of this research is to solve the divergence problem of SLAM using the INS-aiding algorithm to provide the initial position of the point cloud. 2) To address drift problems of conventional SLAM algorithms, the proposed refreshed SLAM allows the system to use a relatively small map rather than using the whole map, requiring less memory consumption and increasing speed. 3) To improve the positioning accuracy of the autonomous driving platform, the third contribution of this research is to proposed an INS/GNSS/LiDAR SLAM fusion algorithm with an integrity assessment. |
||
| Industrial Applicability | The proposed multi-sensor design can deal with various situations such as long-term GNSS outage, urban areas. The results show that the proposed method can achieve an accuracy of under 1 meter in challenging scenarios, which has the potential to contribute to the autonomous system. In general, the presented INS/GNSS/ LiDAR-SLAM method can achieve a 1 m 3D accuracy in various environments or situations based on the results from the GNSS-hostile area. Moreover, all algorithms and related software are developed by the research team. As far as high-precision positioning and orientation systems are concerned, the cost of outsourced systems is high (about three times that of self-developed systems); at the same time, outsourcing cannot support the upgrade of the system's hardware and software. |
||
| Keyword | Autonomous driving intelligent transportation system (ITS) navigation inertial navigation system (INS) global navigation satellite system (GNSS) light detection and ranging (LIDAR) simultaneous localization and mapping (SLAM) sensor fusion integrated system extended Kalman filter (EKF) | ||
- tpp1114@gmail.com
other people also saw