



| 技術名稱 | 基於5G C-V2X之智慧車流預測與預警系統 | ||
|---|---|---|---|
| 計畫單位 | 國立交通大學 | ||
| 計畫主持人 | 李大嵩 | ||
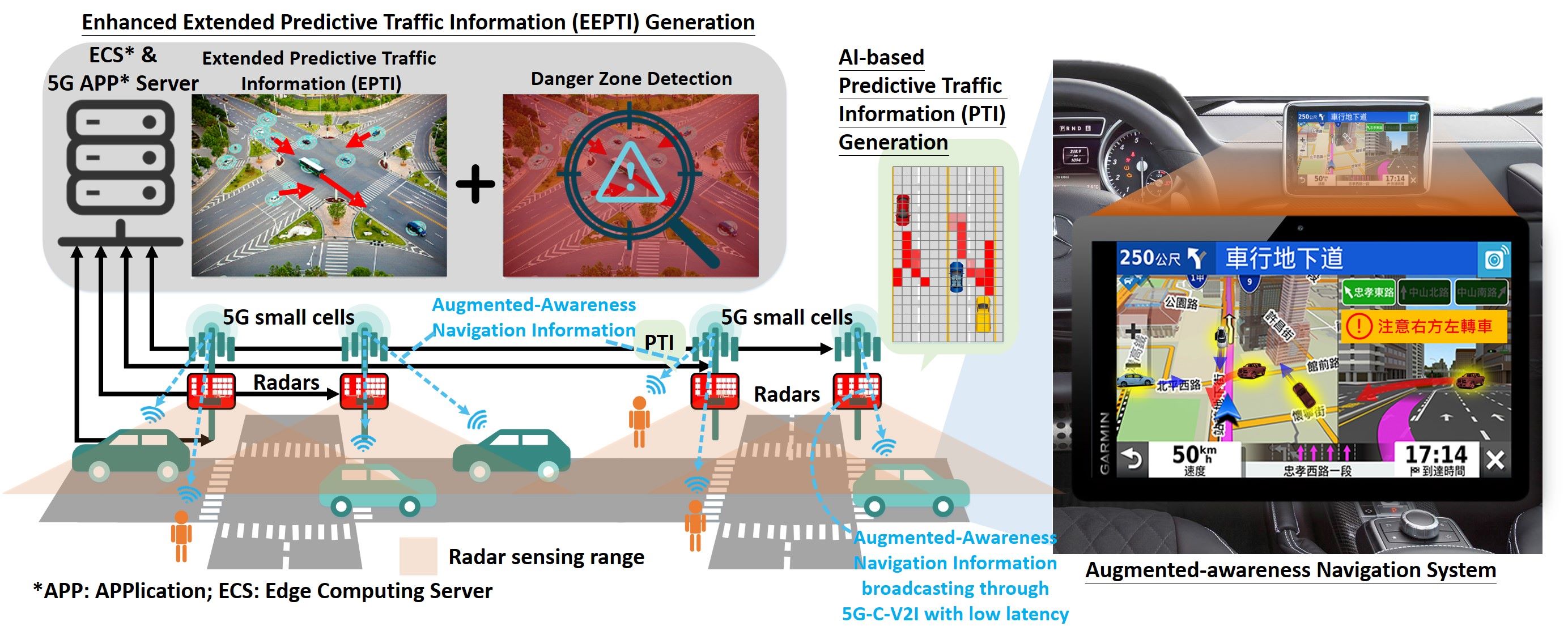
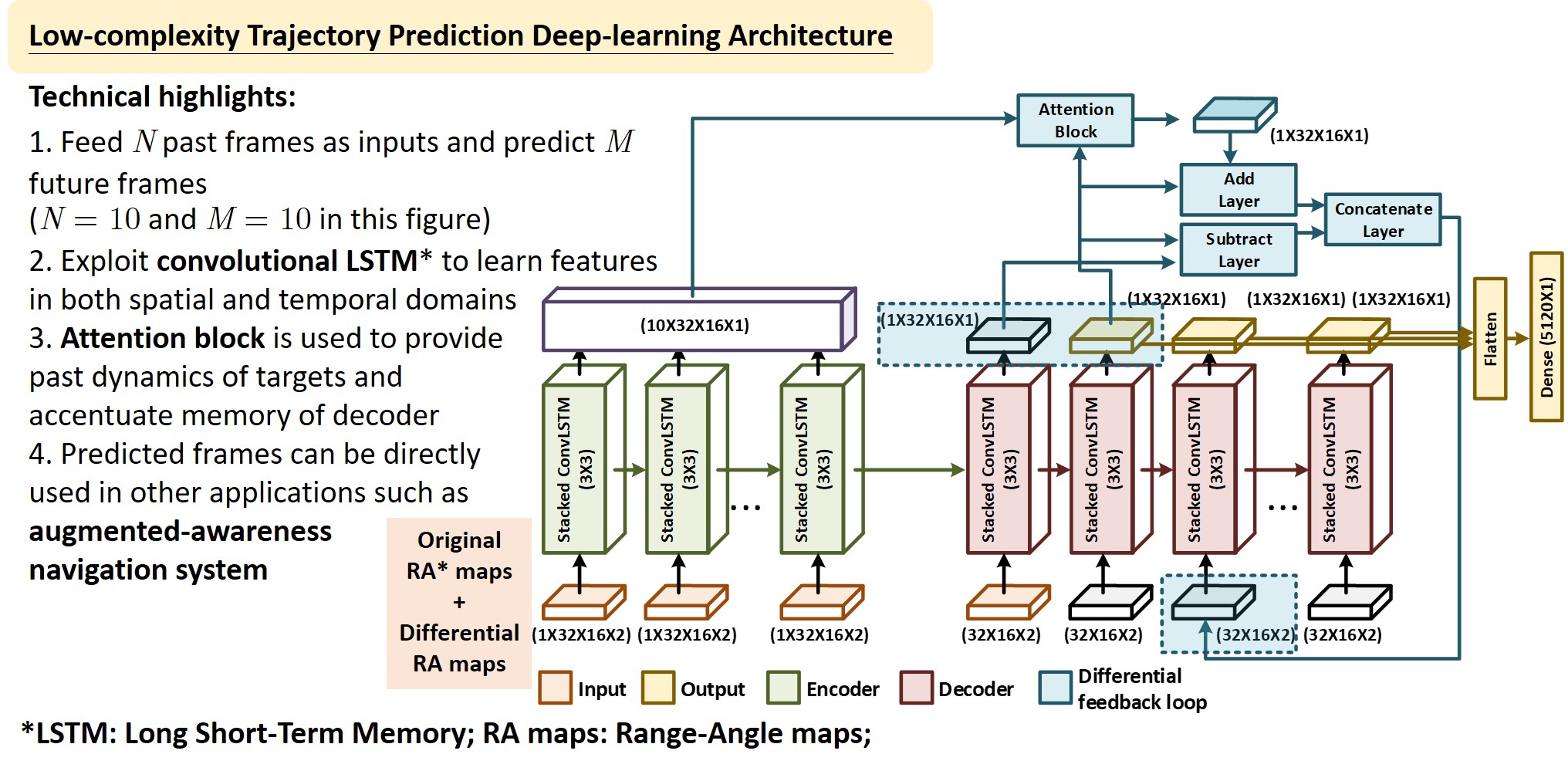
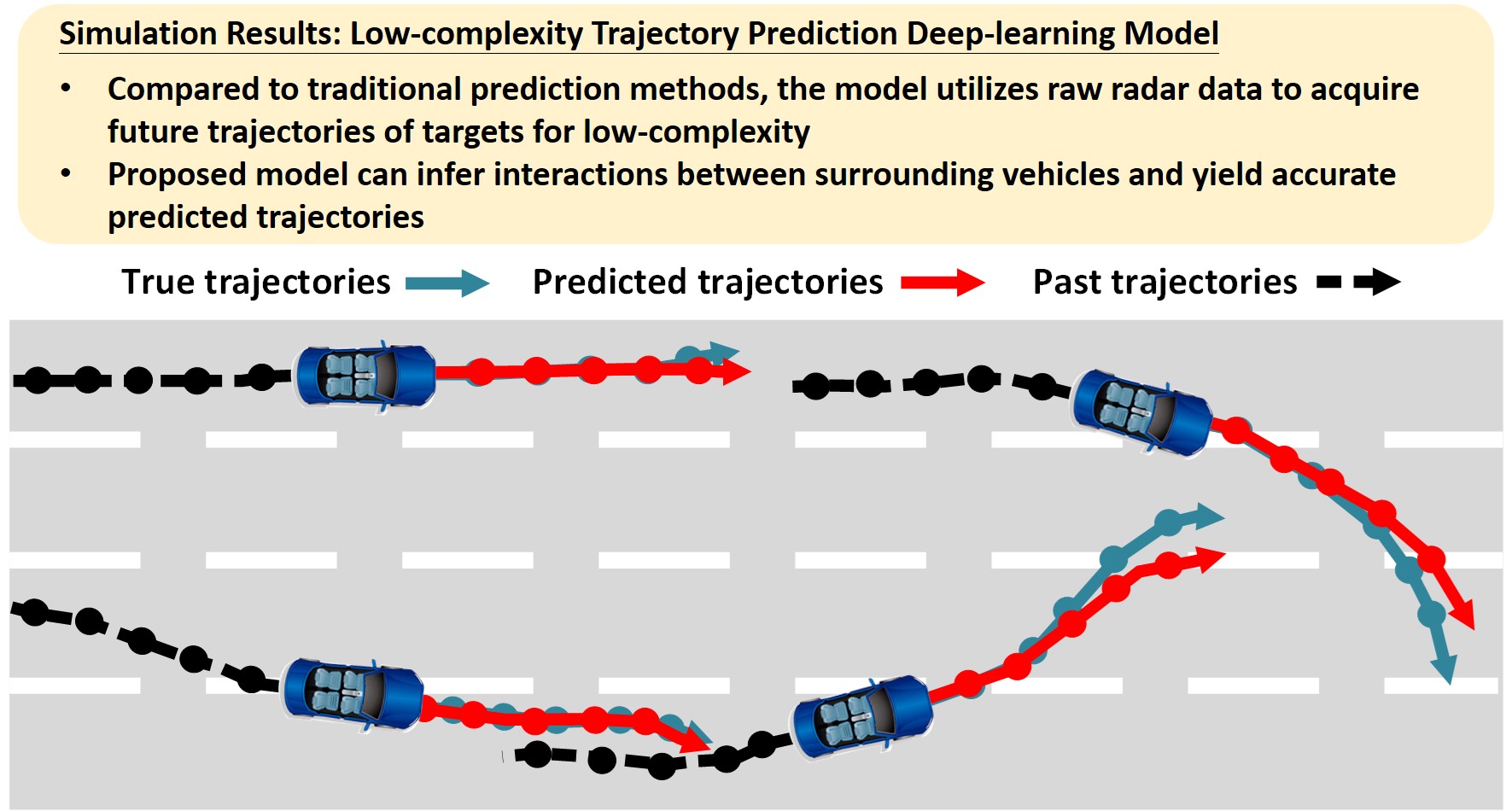
| 技術簡介 | 在高度時變的行車環境中,車流軌跡預測的準確度、範圍和延遲將影響用路人的決策安全,若偵測範圍太小,高速目標容易脫離偵測而造成軌跡預測錯誤;另一方面,降低交通資訊延遲能提供用路人更多反應時間餘裕以避免事故發生。有鑑於此,本案提出一個基於5G蜂巢式車聯網(Cellular Vehicle to Infrastructure, C-V2I)架構之廣域智慧車流預測及預警系統,可實現於具有雷達的路側單元(Roadside Unit, RSU)與5G邊緣運算伺服器(Edge Computing Server, ECS)架構,以滿足超可靠低延遲通訊(Ultra-Reliable and Low Latency Communications, URLLC)需求。本系統包含兩項關鍵技術:「低複雜度廣域車流預測技術」以及「低延遲擴增知覺導航技術」。 |
||
| 科學突破性 | 本案提出基於5G C-V2I架構之廣域智慧車流預測及預警系統,使用不受環境限制的毫米波雷達,開發以人工智慧驅動之多站台融合車流預測及預警技術,藉由低延遲邊緣運算與5G C-V2I通訊網路傳送精確之增強型廣域車流預測資訊給用路人,使其可以使用簡易APP獲得擴增知覺導航能力,可大幅提升其主動安全等級。 |
||
| 產業應用性 | 本案提出之廣域智慧車流預測與預警系統可提供用路人更多時間餘裕進行必要的決策與判斷,用路人可藉由簡易的APP與車機或手機獲得此安全性服務,有極高潛力成為5G智慧交通垂直應用的商轉案例。本系統架構符合5G C-V2X規範,可望與現有車流監測平台整合,切入智慧交通市場,為5G服務開拓藍海,產業前景可觀。 |
||
| 關鍵字 | 毫米波雷達 軌跡預測 深度學習 超可靠低延遲通訊 邊緣運算 智慧感知 遞迴式卷積神經網路 路側單元 自駕車 智慧交通系統 | ||
- 聯絡人
- 胡鈺明
- 電子信箱
- yuminghu@mail.nctu.edu.tw
其他人也看了