



| 技術名稱 | 電腦斷層影像重建方法 | ||
|---|---|---|---|
| 計畫單位 | 國立陽明大學 | ||
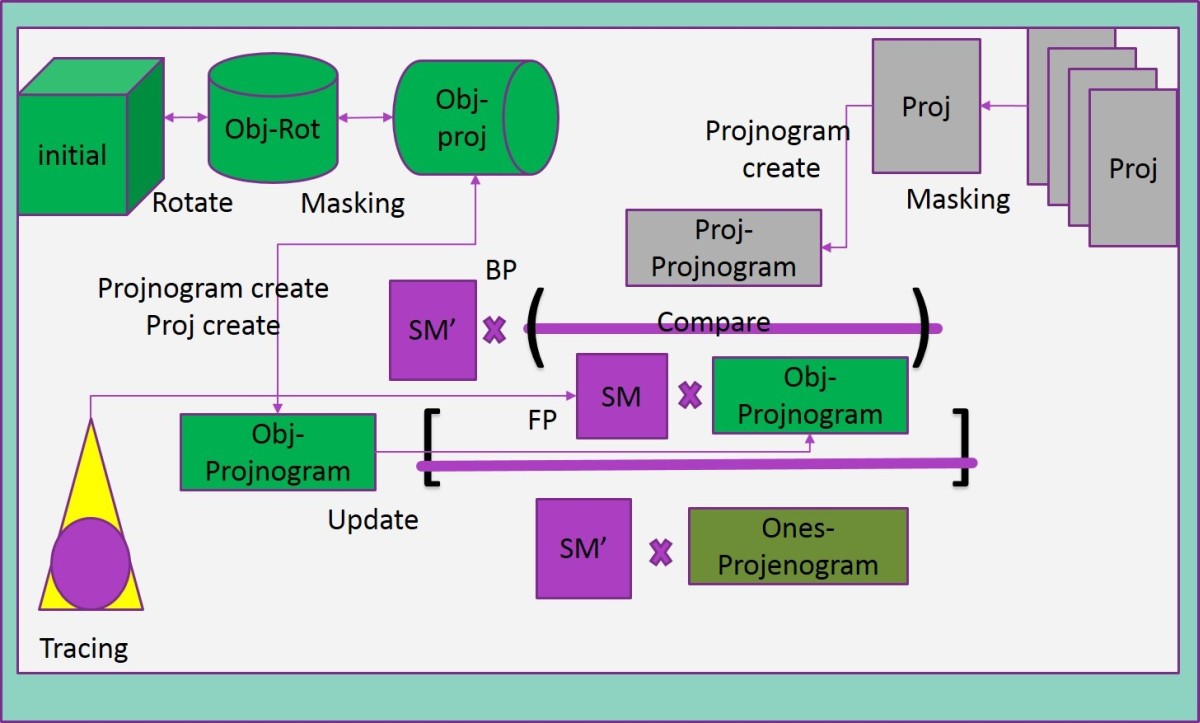
| 技術簡介 | 實施本方法前,必須先透過一套光學影像系統或是進行系統模擬(無實體系統時),其投影頂點處包含一能量源(光源、輻射射源或非輻射射源),其放出之能量可穿越一組物體(為此能量源之吸收體或衰減體),並可被一組影像偵檢器(可量測能量源之儀器)所接收並儲存成一組影像數據資料。目的為依照儀器所需之解析度,建立一組三維影像重建之空間資訊。另外進行影像重建之工作站則依據需求,必須有配置足量之記憶體空間與儲存空間。 |
||
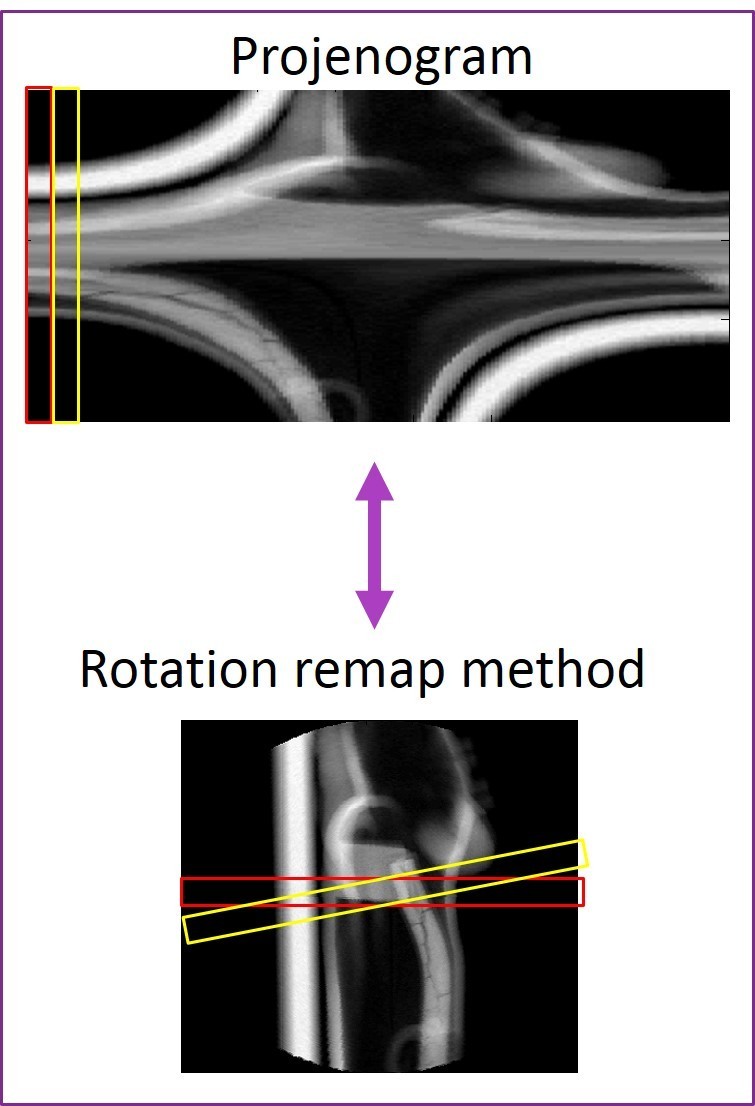
| 科學突破性 | 透過本法所建立之運算架構,可有效減少傳統三維或多維影像之重建時所建立龐大系統矩陣的方式,使用時僅需二維截平面之陣列資料來建立部分的系統矩陣取代傳統建置三維或多維影像之系統矩陣,透過其球座標之對稱特性減少運算時記憶體用量與儲存之空間量。 |
||
| 產業應用性 | 目前CT運用疊代式演算法進行影像重建蔚為趨勢,舉凡醫療儀器有名之大廠:奇異公司、飛利浦、西門子皆有開始開發各自的疊代式演算法。多數演算法考量其經濟效益,採用傳統解析式演算法;代數式疊代搭配最佳化技術在近期慢慢開始出現;僅有極少數採用統計疊代模型來進行影像重建。 |
||
其他人也看了