




| Technical Name | A Virtual-Physical Integrated AI Accelerator Development Platform for Robotic Arms Control | ||
|---|---|---|---|
| Project Operator | National Tsing Hua University | ||
| Project Host | 金仲達、吳誠文、黃稚存、劉靖家 | ||
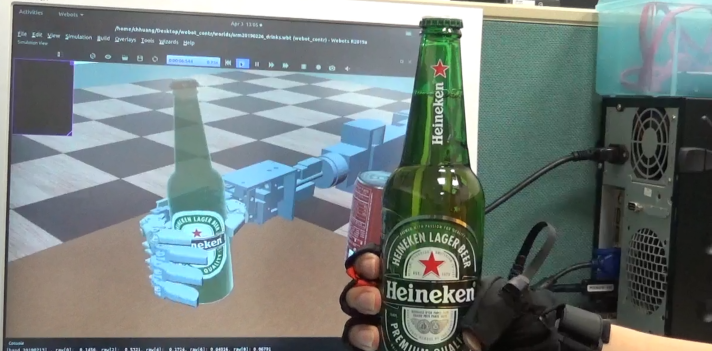
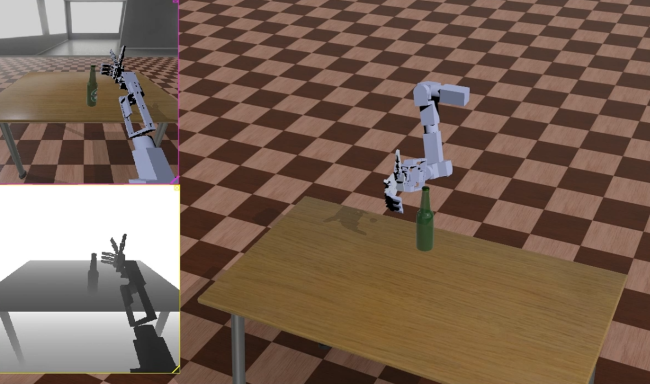
| Summary | The platform provides a complete development process from application to AI accelerator for the future service-oriented robot arms. This platform utilizes human skill transfer, training in highly realistic virtual environment, and hardware/software codesign to significantly reduce the complexity of developing AI accelerators for robotic arm control and applications. |
||
| Scientific Breakthrough | Unlike most existing tools and platforms, the platform encompasses a complete development process from application down to AI accelerator, which dramatically reduces the development complexity of robot control and application. |
||
| Industrial Applicability | This platform provides a complete development process, from application to AI accelerator. Using human demonstration instead of programming, the platform is expected to significantly reduce the complexity and cost of developing future service-oriented robots. Furthermore, a new type of services that provide expert demonstration to readily transfer to robotic arms may be formed. |
||
| Keyword | Robotic arms deep learning AI accelerators training in virtual skill transfer human action extraction AI compiler architecture design of AI accelerators design space exploitation model optimization | ||
- jungwu@cs.nthu.edu.tw
other people also saw