




| Technical Name | Recognition/collision avoidance/navigation techniques for intelligent autonomous movers tailored to hypermarkets | ||
|---|---|---|---|
| Project Operator | National Chung Hsing University | ||
| Project Host | 黃穎聰 | ||
| Summary | •Deep learning based image recognition techniques –various object detections and behavioral prediction model |
||
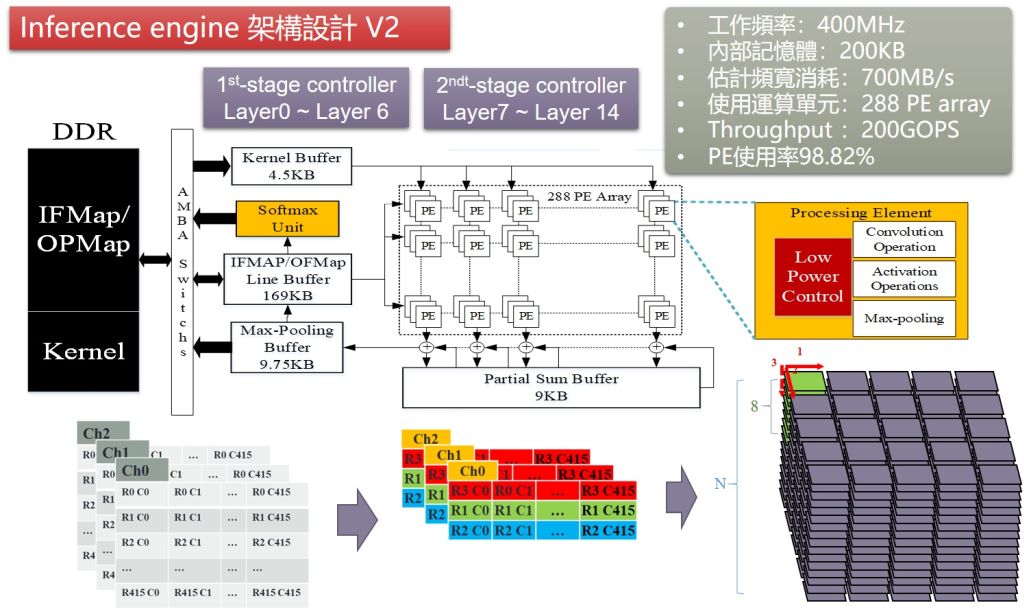
| Scientific Breakthrough | The first image based object detection system enhanced with behavioral prediction for people rich environments. A novel edge AI accelerator design for object detection with a computing capability of 4.73TOPS/W. Dynamic feature map update, optimal routing path planning, and DQN distributed computing scheme for cloud control center. The first ultrasonic array radar for DoA and distance estimation. |
||
| Industrial Applicability | We provide enabling technologies of autonomous movers to move freely in people rich environments such as shopping mall. These include |
||
| Keyword | autonomous mover shopping mall service object identification obstacle detection AI/deep learning edge computing processor navigation control cloud control center data fusion ultrasonic array radar | ||
- shuchi@dragon.nchu.edu.tw
other people also saw