



| Technical Name | Six-axis force/torque sensor and calibration technique | ||
|---|---|---|---|
| Project Operator | National Sun Yat-sen University | ||
| Project Host | 王郁仁 | ||
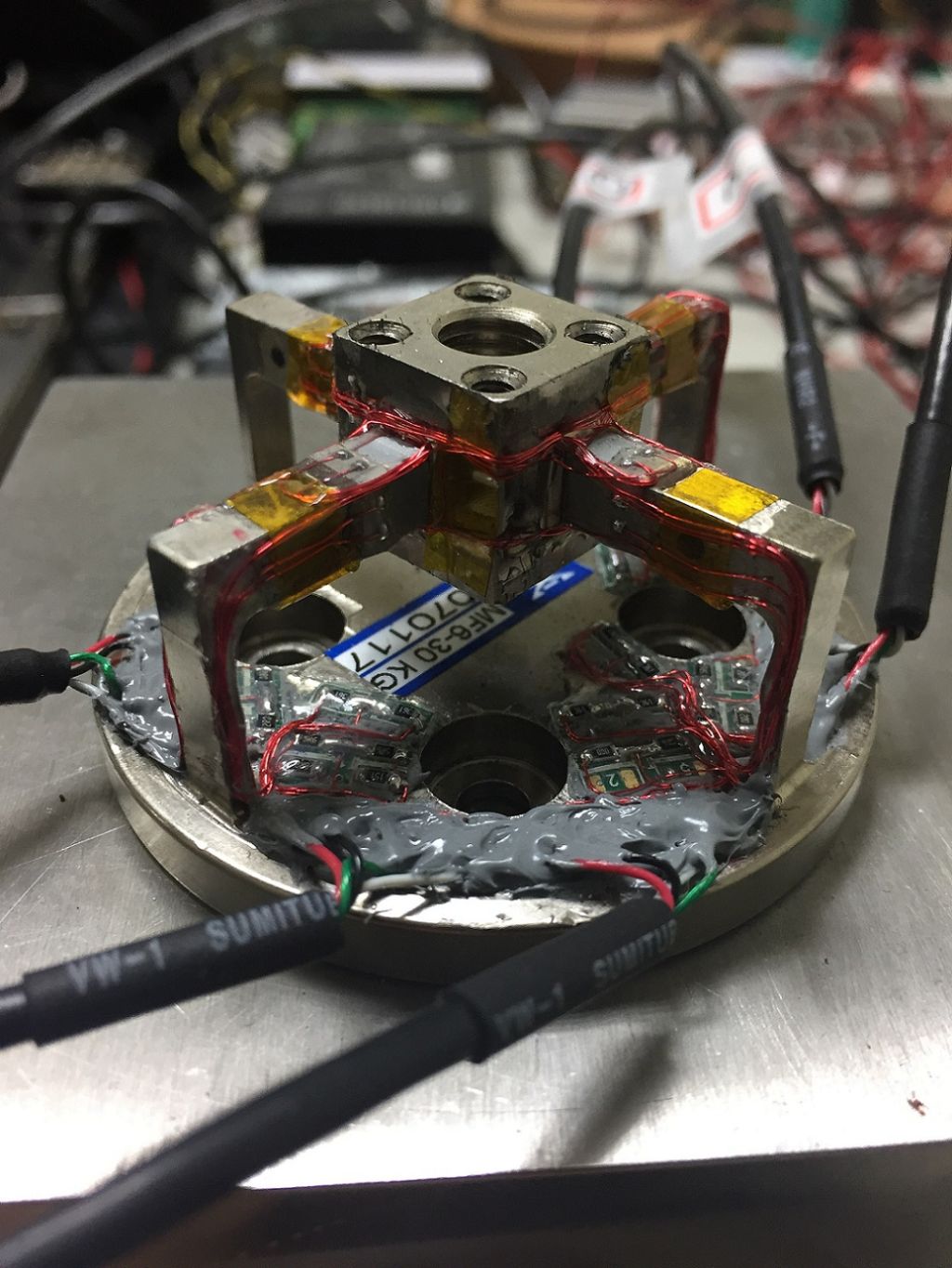
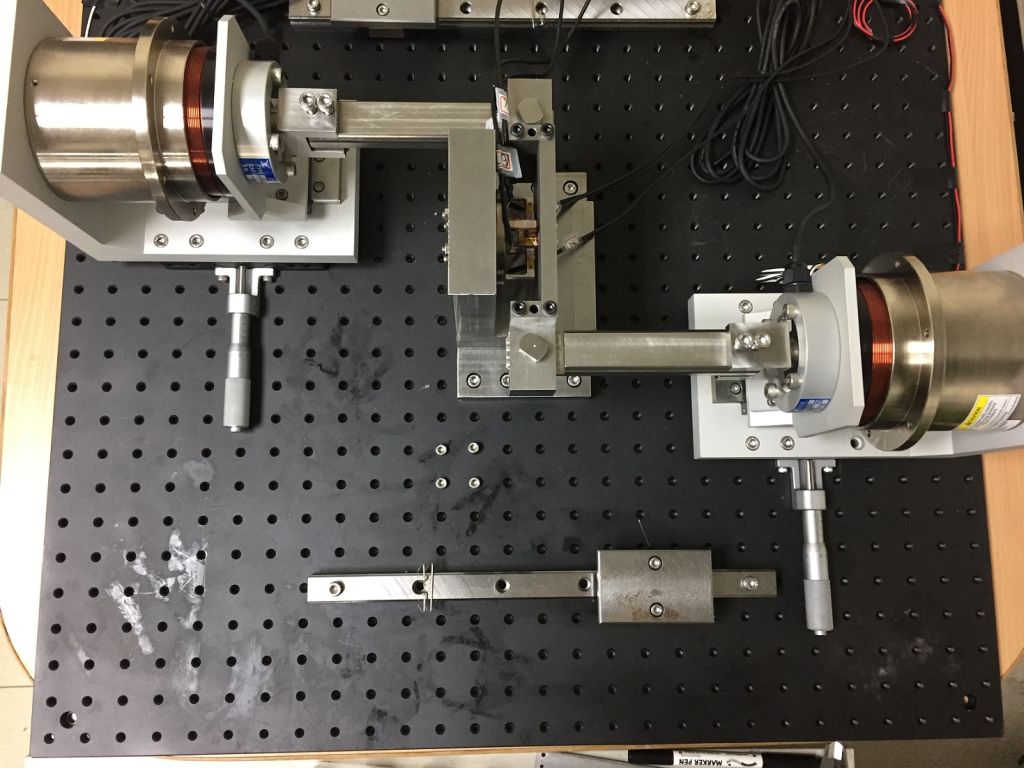
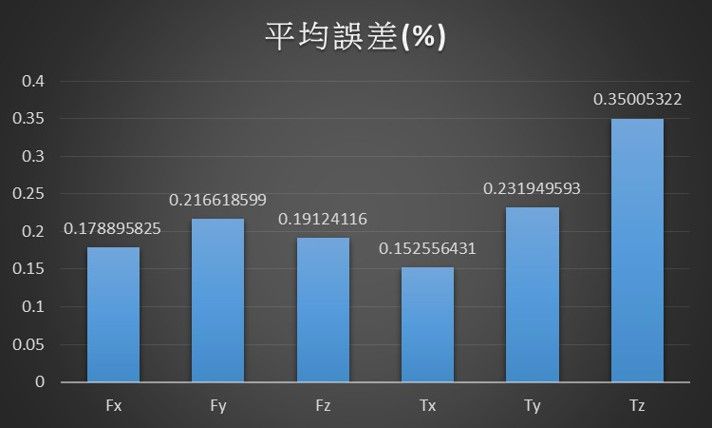
| Summary | The technology is a multi-axis force sensor and calibration know-how which create a transfer function of force for the output voltage. Key calibration techniques is developed for the calibrate platform producing precise force directly to the sensor structure. The connection between the input voltage and the output power of the multi-axis sensor is established by using the method of least squares and Neural Network.Six-axis force torque sensor sensing range: ±300 N; ±20 N-m Accuracy: 0.25 % FS |
||
| Scientific Breakthrough | Six-axis force sensor designed to utilize a double-loop and a crab foot structure. It made different axial forces to produce specific deformations . It coordinated attached strain gauge with reducing coupling of Wheatstone bridges. The calibration platform can provide multiple axial forces simultaneously to ensure that a corrective force is given to collect the strain signals generated by the force sensor. |
||
| Industrial Applicability | The use of robotic arms has become the main option of returning the production line back to the country of origin. The industrial robotic arms are relying on multi-axis force sensors to provide signal processing feedback, to complete the jobs of polishing, grinding, assembling precision devices, etc. The force sensor technology is developed by our team and has begun collaboration discussions with manufacturers in the industry. |
||
| Keyword | Multi-axis force/torque sensor Force calibration Least mean square Deep learning Neural network Strain gauge Smart machine Robot arm Force calibration machine Industry 4.0 | ||
- sh970726@gmail.com
other people also saw