:::
- 首頁
- /
- 年度
- /
- 2018
- /
- AI智慧應用&電子&光電
- /
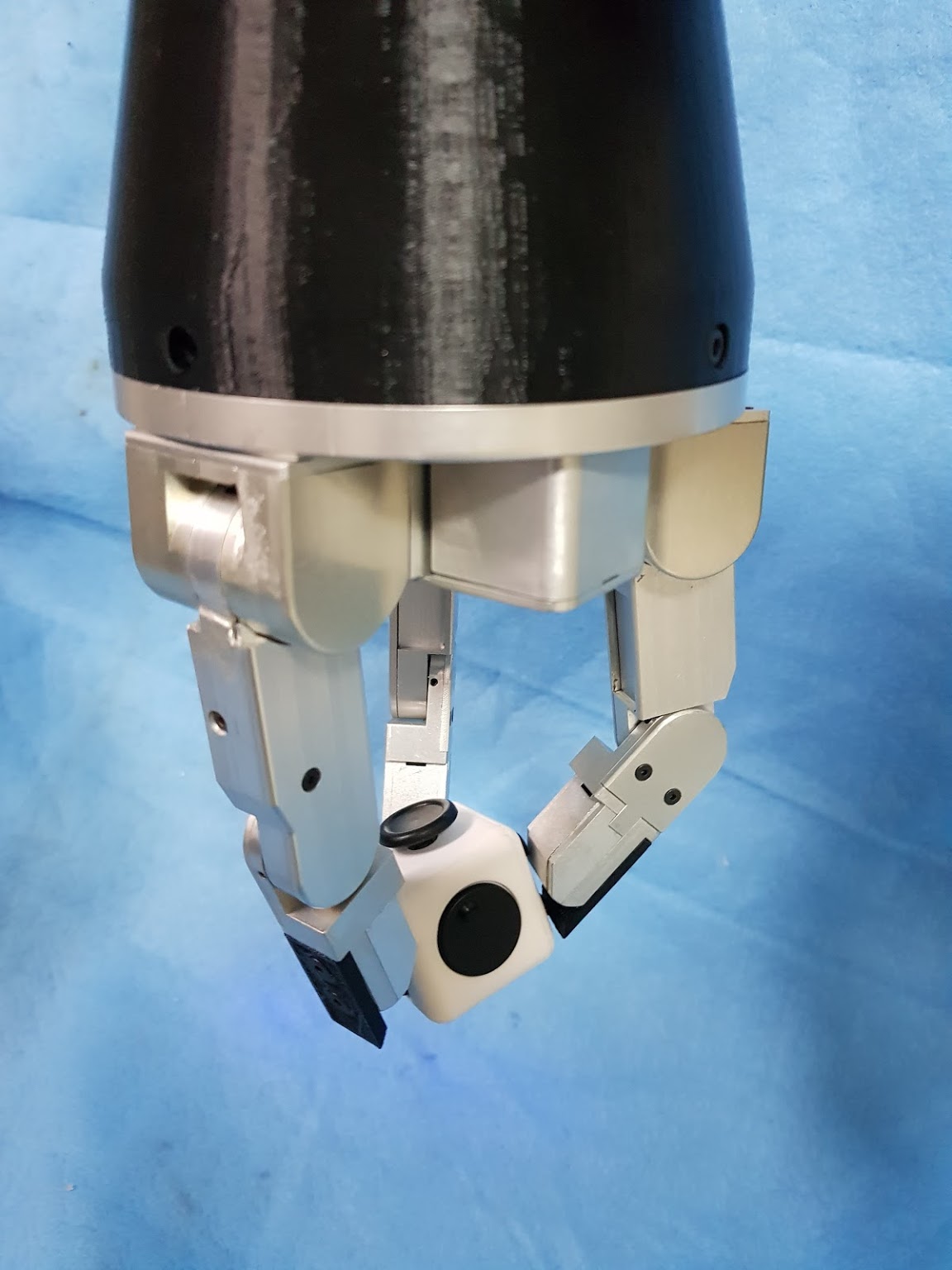
- 工業用機械手臂之智能夾爪模組與觸覺模組




| 技術名稱 | 工業用機械手臂之智能夾爪模組與觸覺模組 | ||
|---|---|---|---|
| 計畫單位 | 國立台北科技大學 | ||
| 計畫主持人 | 黃榮堂 | ||
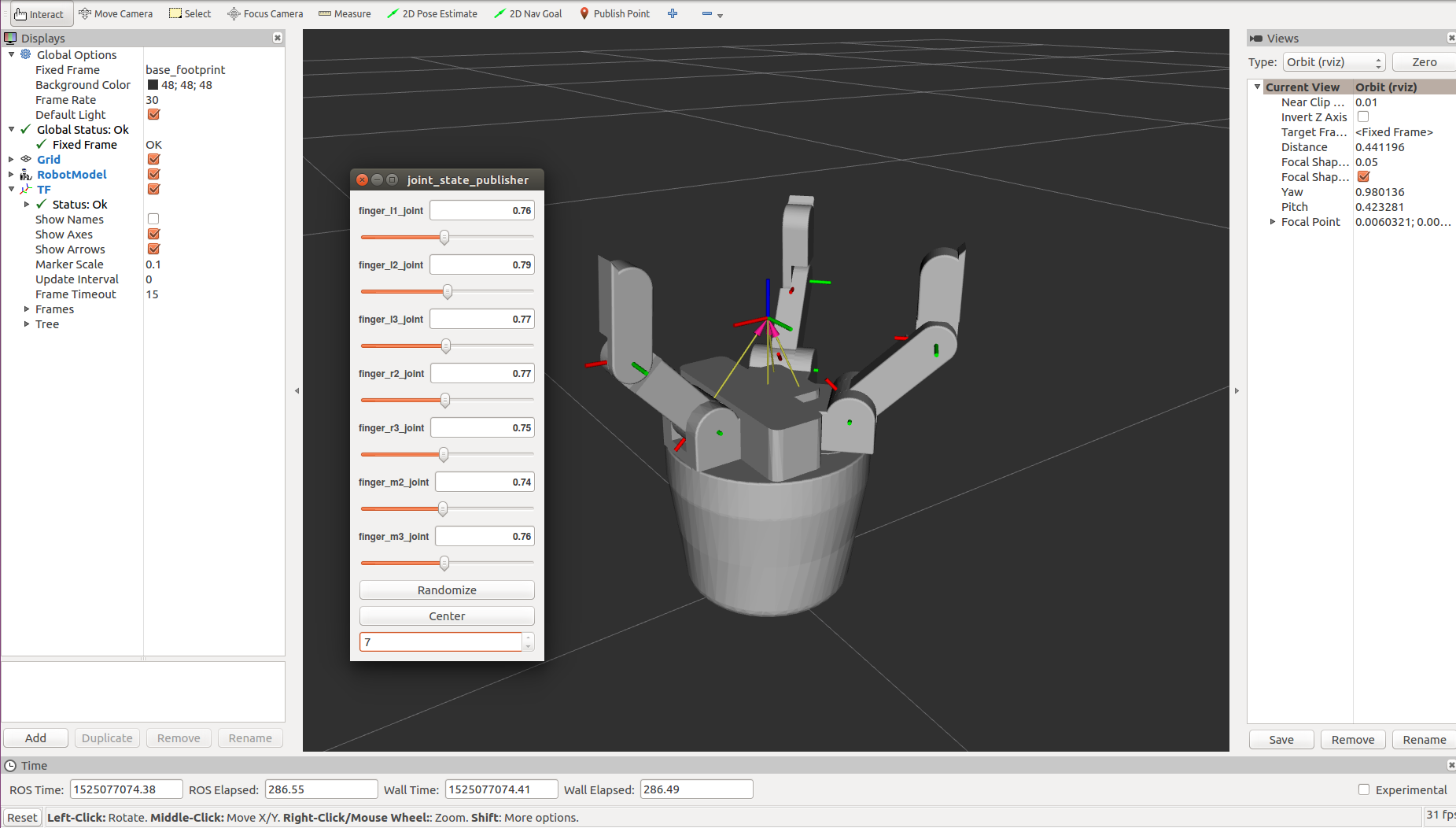
| 技術簡介 | "1.低成本 2.抓取力量大 3.手指具有自鎖的能力 4.ROS based操控環境 5.人機介面操作 6.採用CAN-BUS傳輸 7.電容磁感複合式壓/剪力3D 力量感測器 8.含有3D 視覺的自適應多自由度夾爪" |
||
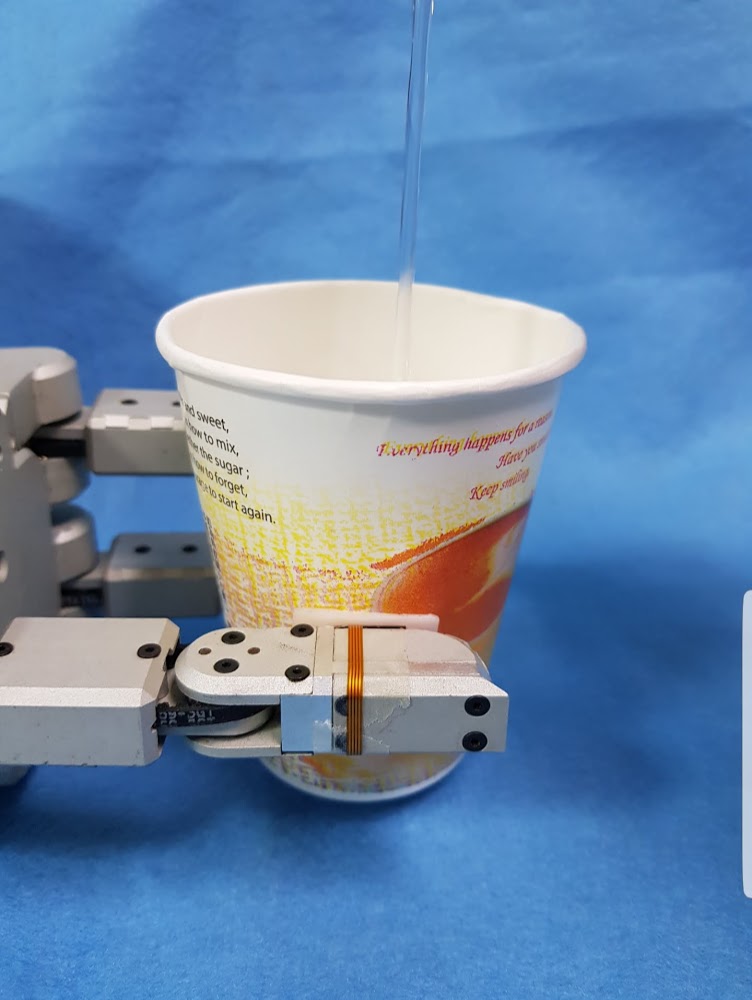
| 科學突破性 | "本計畫與鑫鉅振工業有限公司共同開發機械手指,朝向高靈活度、壓力感測回饋、高度應適性開發。高靈活度使機械手指在工作範圍內能夠抓取各種外型的工件,開發一款能被稱為『智能手指』,而非僅是具有手指外型的夾爪;並且在手指的表層上佈上壓/剪力感測器,將採用電容式觸覺感測器,並且以FDC2214作為容值讀取晶片 |
||
| 產業應用性 | 本計畫將針對符合智慧自動化使用的智能夾爪開發,以達到外型複雜或脆弱的工件抓取、壓力感測安全防護之功效,並且透過編撰程式與現有的工廠系統整合讓使用上更為簡易,在借重合作廠商的OEM 專業經驗與多樣產品開發經驗且有機械手臂的代理權,希望可使本智能夾爪更符合製造產線上的使用,和未來智慧自動化的趨勢。完成此 |
||
| 關鍵字 | |||
- 聯絡人
- 郭宗穎
- 電子信箱
- futuretech.most@gmail.com
其他人也看了