





| Technical Name | RobustAutonomous UAVs Navigation for Accurate River Following | ||
|---|---|---|---|
| Project Operator | National Yang Ming Chiao Tung University | ||
| Project Host | 劉吉軒 | ||
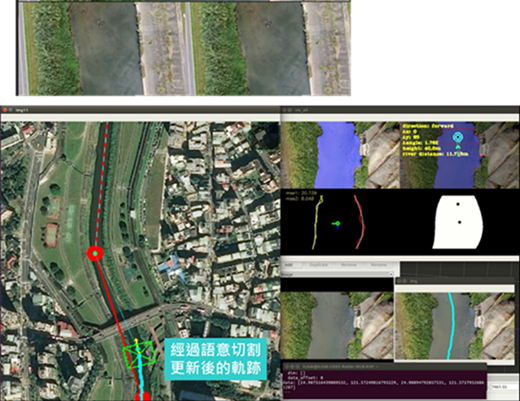
| Summary | This technology provides robust AI navigation for autonomous UAV river following with visual perception. Dynamic local path planning is based on central axis of the detected river mask. This provides navigation autonomy on accurate river following. When river detection errors occur, both river mask detection historythe sketchy global path are used for temporary navigation reference. This provide navigation robustness on accurate river following. Our drone field test has successfully demonstrated autonomousaccurate river following for a distance of 3.5 kilometer. The technology overcomes difficulties of bridges across the river, reflection on river surface, river bed patch,show robust performance. |
||
| Scientific Breakthrough | The major problem of current river following techniques is the reliance of multiple sensorsthe isolated image detection. Our technology integrates several functional modulesincorporates logical decision-making mechanismsatellite map information. Adaptive responses to various situations are designed into the autonomous control architecture, therefore, providing sufficient robustness. Performance advances are shown in navigation autonomy, following accuracy,real-word validation. |
||
| Industrial Applicability | However, for river inspection applications, these two control modes have their own disadvantages. Our technology is capable of autonomousaccurate river followingequipped with satellite map information system. This represents a major breakthrough for industrial use of UAV river inspection applications. Market value of UAV application in river ecological protection is also expected to expand. |
||
| Keyword | UAV application autonomous navigation control river following river inspection satellite map information model river semantic segmentation navigation path planning robust AI control system | ||
- Contact
- Gong-Yi Lee
- james88385542@gmail.com
other people also saw