



prev
next
| Technical Name | Development of fiber-containing soft robots for microsurgery by 3D printing | ||
|---|---|---|---|
| Project Operator | National Chung Cheng University | ||
| Project Host | 劉德騏 | ||
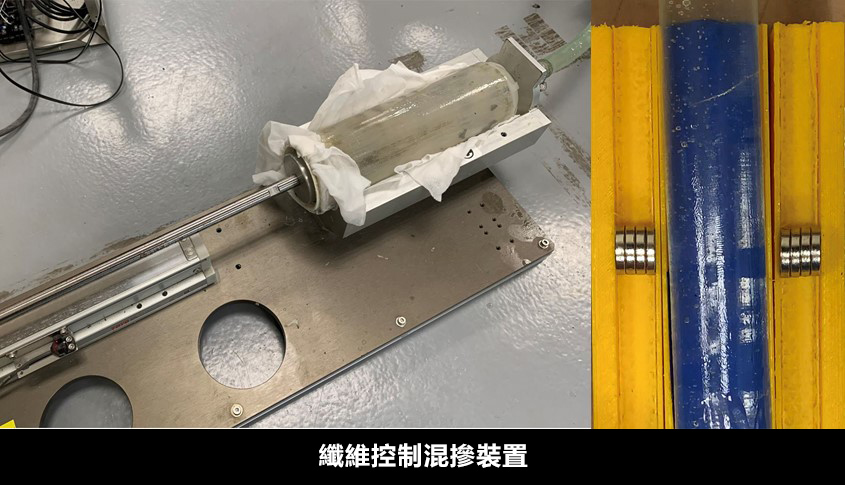
| Summary | In order to improve the application of soft robots in minimally invasive surgery in the future, this research uses a self-developed liquid soft material 3D printer. 3D printing will greatly increase design flexibility within a single structure. In addition, plant fibers that are harmless to the human body are mixed with soft materials. The analysis software COMSOL will be used to predict the effect of fiber fillingalignment on the strength of the soft robot. Finally, the internal structure design of sensor integration is optimized to enhance the best surgical experience for physicians. |
||
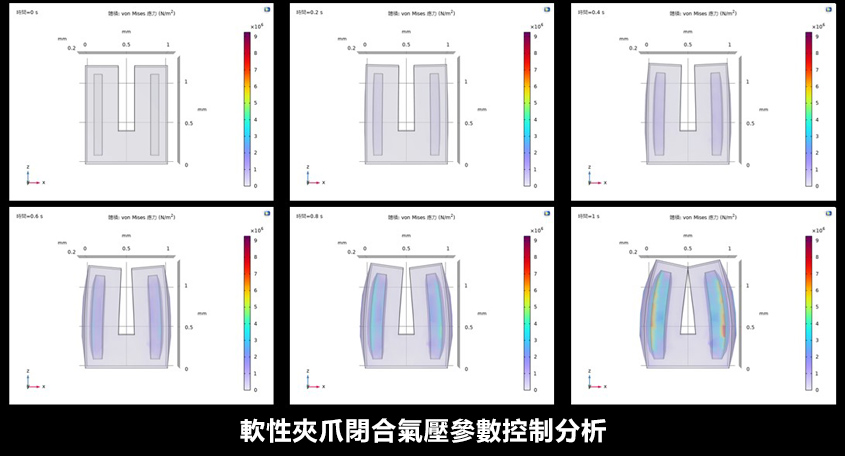
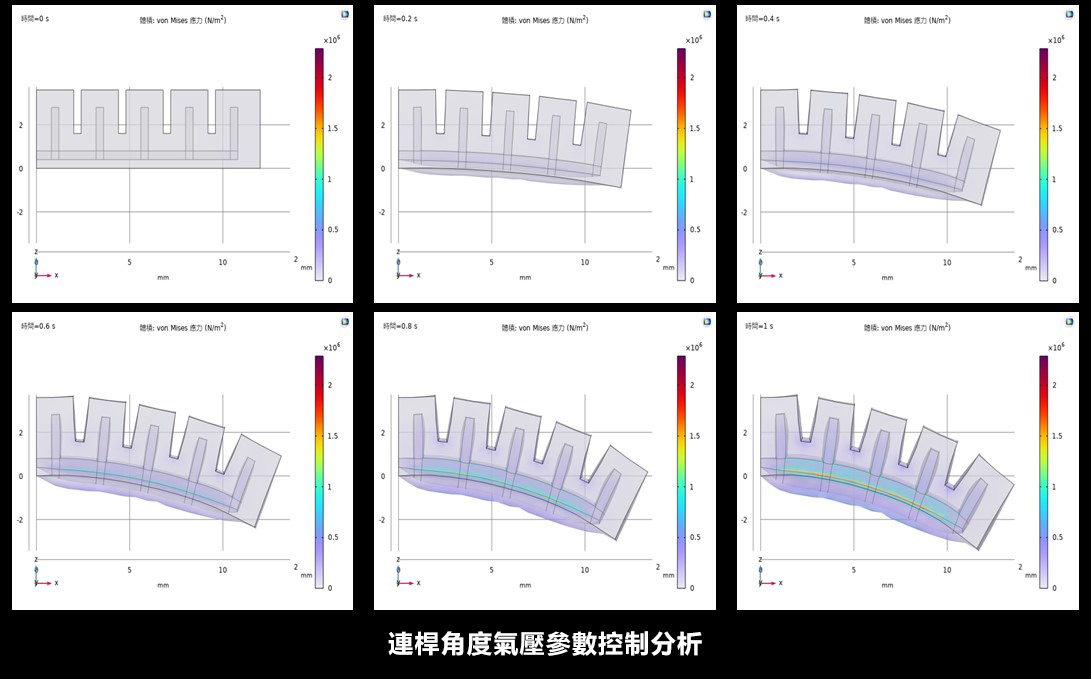
| Scientific Breakthrough | We present the design of a fully 3D printable MIS instrument.We use composite fibersnumerical design analysis to reduce the strengthsupport shortcomings of soft robots.Current structural control can produce omnidirectional bending from 0 to 90 degrees.The error of plusminus 0.2mm can be achieved in the control of the drive angle accuracy.The self-developed liquid soft material 3D printer, the thinnest design of a single piece can reach 1mm thickness,the minimum internal diameter can reach 0.2mm. |
||
| Industrial Applicability | Soft robots use materials that can change their shapeelastic rigidity, which are lightweight, but also adapted to intimate human contact: comfortable, soft enough to prevent injuries, biocompatiblecompliant. These features will potentially lead to plenty of promising new technologies in a broad range of social, scientific,industrial activities in the future. Most of these applications should be part of the biomedical field. From large size robots like soft wearable robots, soft prosthetics, co-robots to miniaturized robots for field exploration, drug delivery, minimally invasive surgery,medical implants, the number of applications of soft robotics in the medical field is broad. |
||
| Keyword | 3D printing Soft robot Micro surgical tools Plan fibers Fiber orientation | ||
- Contact
- Tzu-Hao Chen
- d97420010@gmail.com
other people also saw
prev
next