:::
- Home
- /
- Year
- /
- 2021
- /
- AIoT & Smart Applications
- /
- 次世代擴增實境導航系統




| Technical Name | 次世代擴增實境導航系統 | ||
|---|---|---|---|
| Project Operator | Feng Chia University | ||
| Project Host | 林昱成 | ||
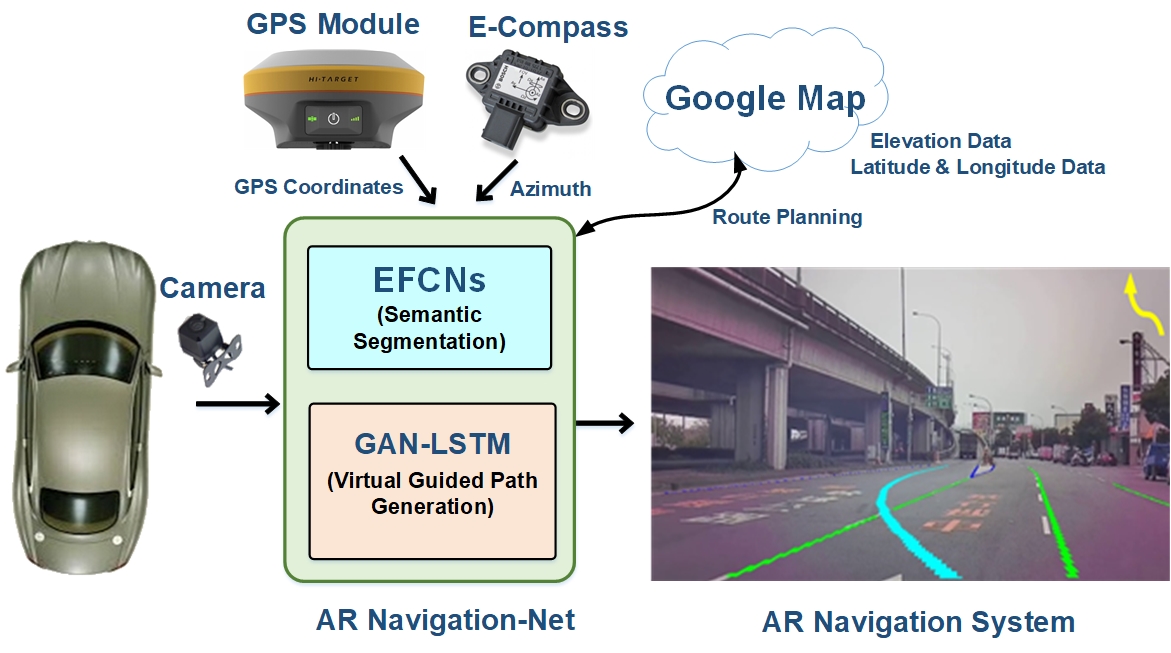
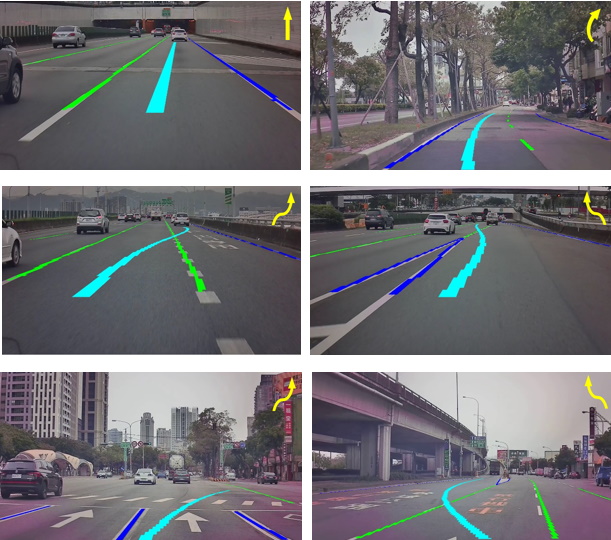
| Summary | This invention presents a "next-generation augmented reality navigation system” using the generative adversarial network-long short term memory network (GAN-LSTM) framework with integrated GPS module to implement a novel AR navigation system. Unlike the presented AR navigation system, the virtual guided path is "autonomously generated" in captured image rather than superimpose on the image by using the pre-rendered 3D content, which not only provide a more authenticcorrect AR effect to user but also earlycorrectly guide the driver when driving in complex road traffic environment. |
||
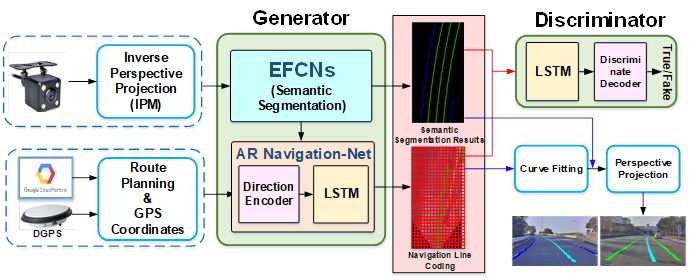
| Scientific Breakthrough | The system consists of three technical parts: 1. path planninglocation point capturing, 2. autonomously generated of virtual guided path, 3. AR 3D visualization. User uses the Google cloud service to complete the path planninglocation point capturing. Next, the innovative GAN-LSTM architecture with integrated GPS is developed to automatically generate the appropriate virtual guided path in the current scene. Finally, AR 3D visualization is achieved by the perspective projection method so as to implement a more accurate 3D augmented reality navigation system. |
||
| Industrial Applicability | This invention develops a next-generation augmented reality navigation system using deep learning technology with integrated GPS module to implement an autonomously generated virtual guided path, which can provide a more authentic AR effect when driving in complex road traffic environment. Nowadays, most well-known navigation system companies are mainly from Taiwanthe United Stateshave quite complete relevant markets. Hence, through our proposed invention, these existing navigation companies can quickly assist their technology upgrades,will bring significant industrial impact. |
||
| Matching Needs | 天使投資人、策略合作夥伴 |
||
| Keyword | Augmented Reality Navigation System Deep Learning Generative Adversarial Network (GAN) Virtual Guided Path Perspective Projection Scheme Semantic Segmentation Lane Line Recognition Lane Change Long Short-Term Memory Network (LSTM) | ||
- yuchlin@fcu.edu.tw
other people also saw