



| Technical Name | 基於互動感知的自動化物件偵測學習 | ||
|---|---|---|---|
| Project Operator | National Taiwan University | ||
| Project Host | 徐宏民 | ||
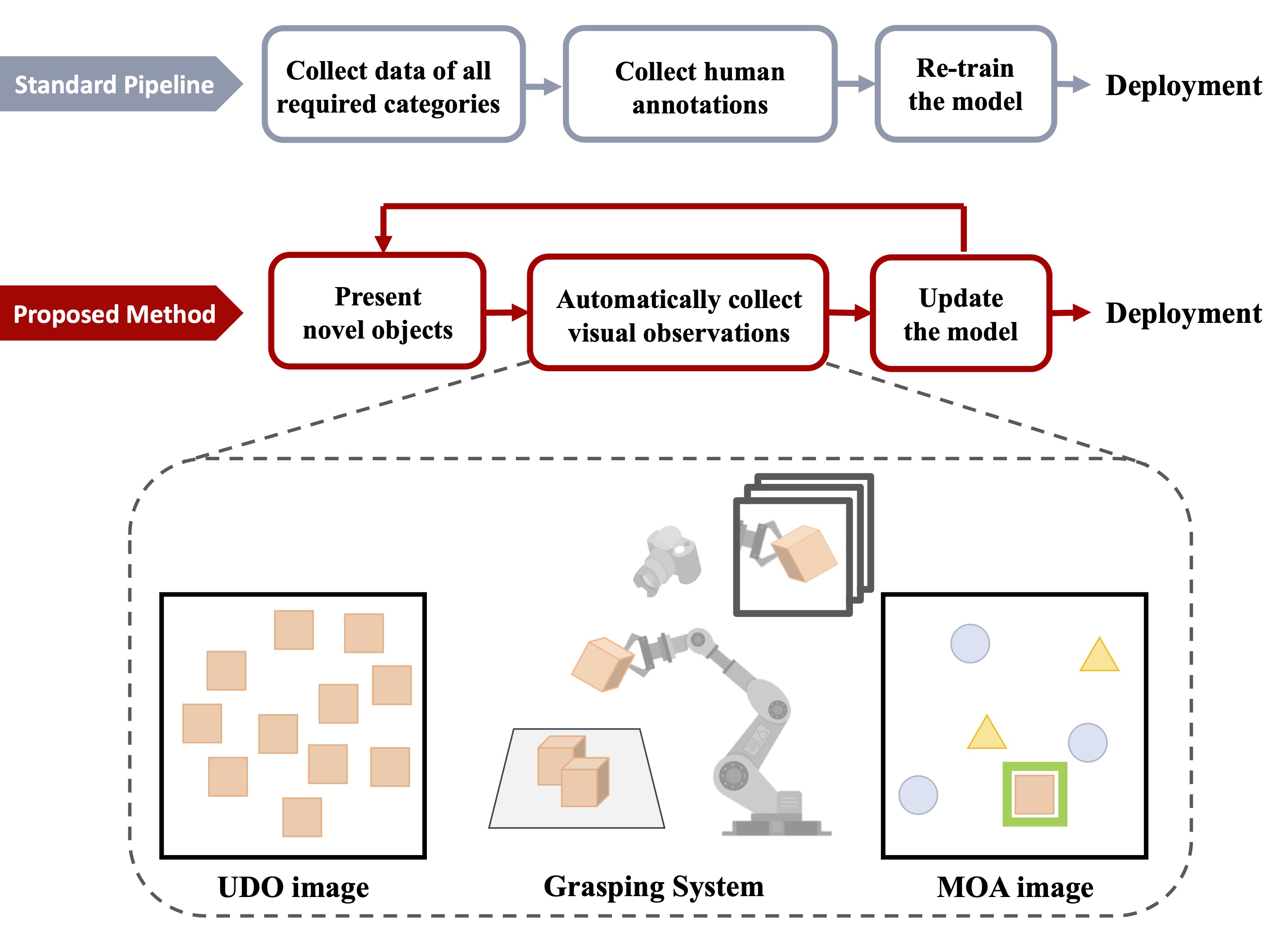
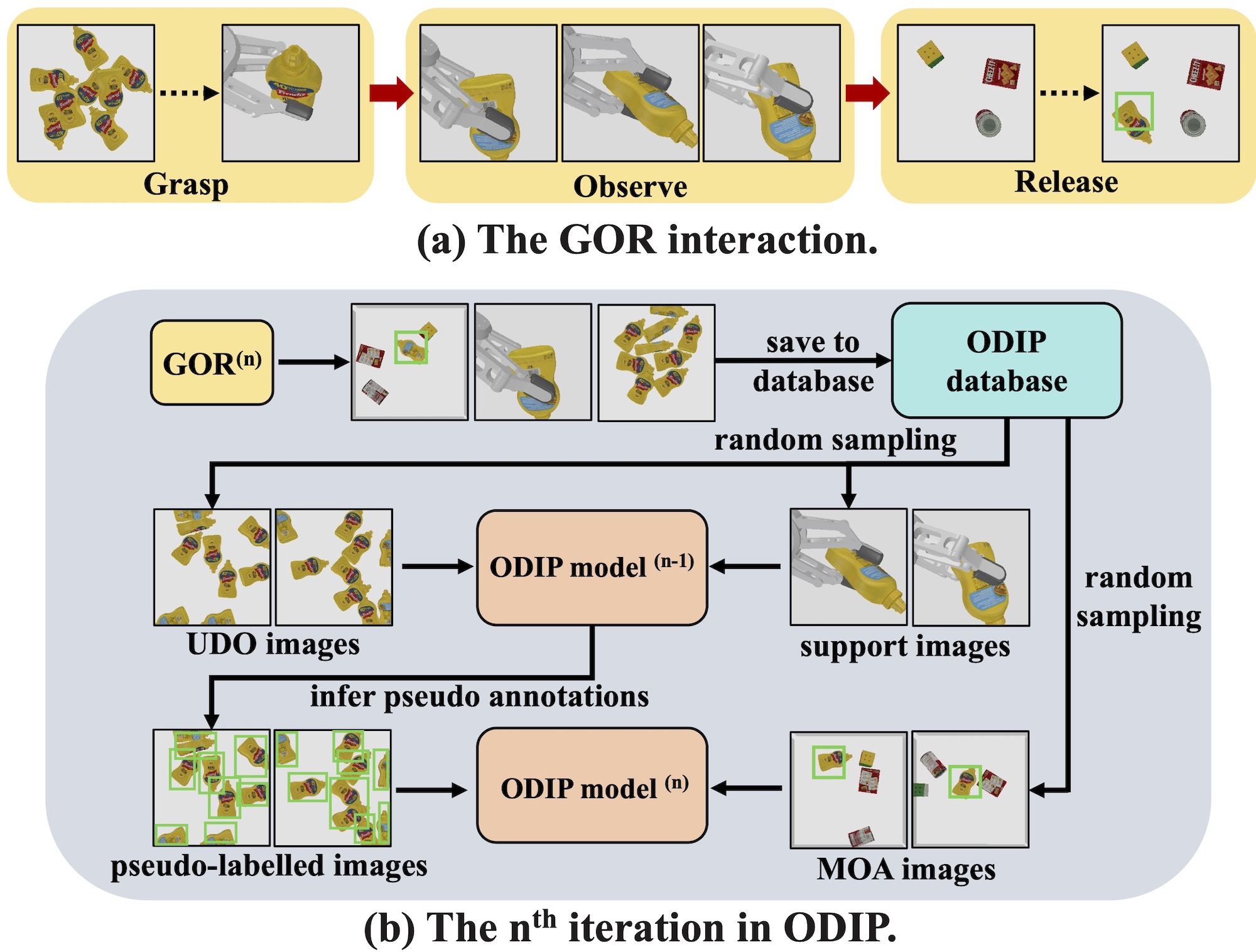
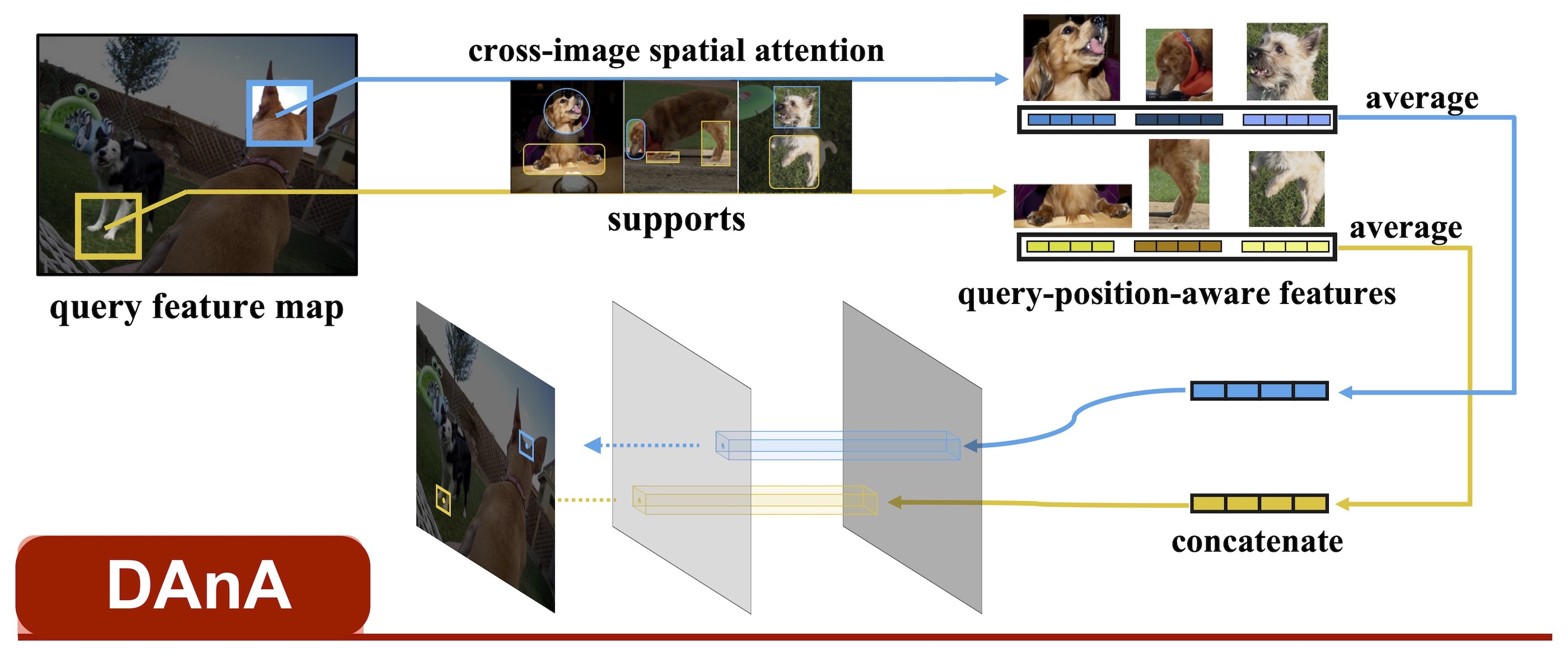
| Summary | Inspired by the human nature that a child can learn by taking an objectthen observing it, we proposed two novel methods: (1) Object Detection by Interactive Perception (ODIP), where a few-shot object detector gradually learns unseen instances by interacting with a well-developed object grasping system, collecting required visual dataannotations in an automatic manner. (2) an efficienteffective few-shot object detection model with novel attention mechanism called Dual-Awareness Attention (DAnA). |
||
| Technical Film |
|
||
| Scientific Breakthrough | ODIP gradually learns unseen instances by interacting with an object grasping system. The model trained in ODIP achieves superior performance over the best conventionalfew-shot object detectors. We also proposed a novel few-shot object detector that significantly increases the performance by up to 47 compared to the strongest baseline method,achieves the highest robustness in comparison with the baselines as various support images are given. |
||
| Industrial Applicability | The proposed ODIP paradigm can significantly reduce the expensivetime-consuming process of collecting dataannotations for the deployment in industrial scenarios. It will conspicuously facilitate the deployment of advanced deep learning techniques in several fields (e.g., industry, healthcare, home, etc.), where the annotated data are usually limited. |
||
| Matching Needs | 天使投資人、策略合作夥伴 |
||
| Keyword | robot arm interactive perception object detection few-shot learning few-shot object detection deep learning cross-domain learning | ||
- whsu@ntu.edu.tw
other people also saw








