



| Technical Name | 自主無人機巡檢系統 | ||
|---|---|---|---|
| Project Operator | National Chengchi University | ||
| Project Host | 劉吉軒 | ||
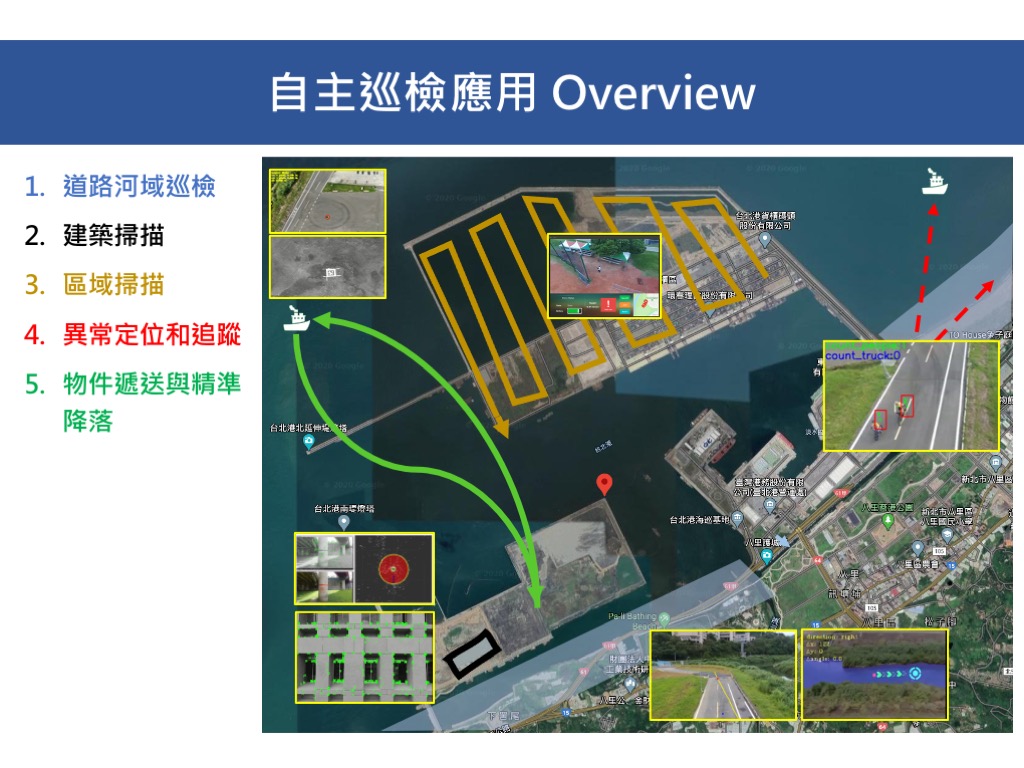
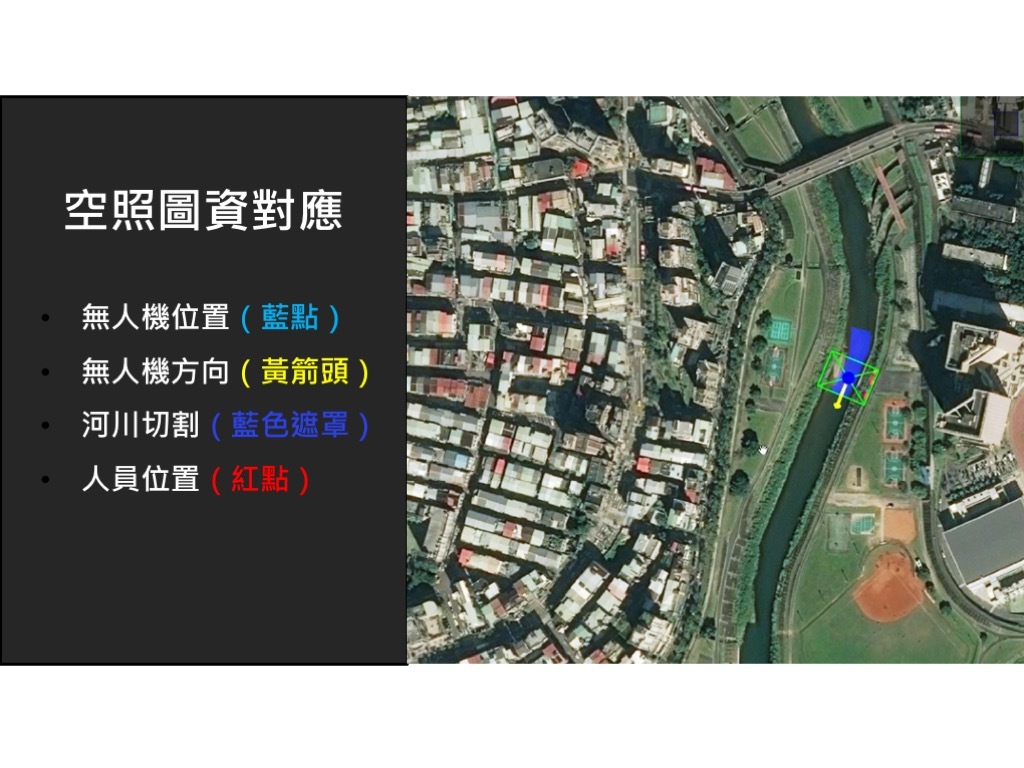
| Summary | With our autonomous UAV systems, we can effectively reduce many high-riskhigh-cost inspections which require high manpower, such as inspections of dams, river, coastline patrols, etc Operators only need to setuplaunch the system to allow the UAV to complete the designated tasks independently. The UAV will fly autonomously through visual navigation,will detect, record, measuremark the specified objects accordingly, while updating information to the satellite aerial image using spatial positioning technology, so that stakeholders can have a more comprehensive understanding on overall situation. |
||
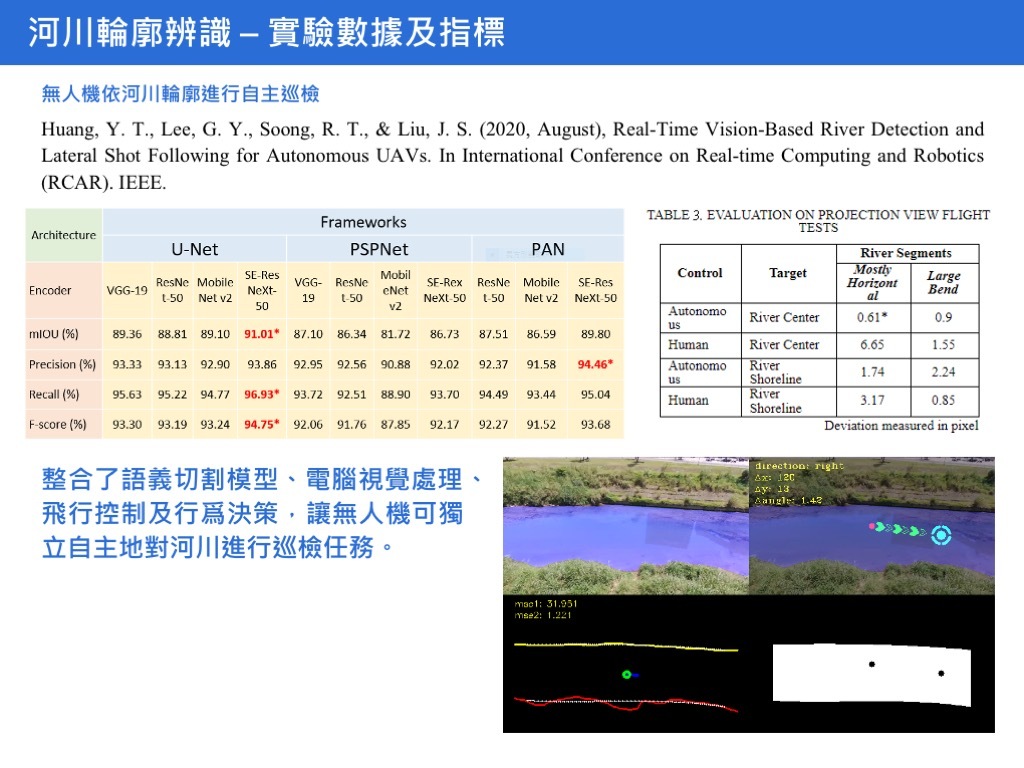
| Scientific Breakthrough | This technology integrates different technical modules through a decision modelverifies it in a real environment, to test verify that our autonomous UAV system can complete inspection tasks independently. This technology closely combines visual perceptionflight control. In order to improve instant response, the visual model is lightened. Combined with spatial positioning technology, it can provide more accurate object positions compared to other drone research, we focused more on solving real-world environment issues, which provides sufficient index to support robustness. |
||
| Industrial Applicability | This technology can effectively supplement the manpowerdata requirements for inspections, assist them to update facility information regularlymore comprehensively at relatively low costsrisks,support decision-making in resource distribution. This technology is not only suitable for inspection-related tasks, but also provides new solutions for different industries. Through the images provided by drones, it can provide decision-making information in different situations, such as: UAV signal base station, high-speed rail detection, object delivery. |
||
| Matching Needs | 天使投資人、策略合作夥伴 |
||
| Keyword | Autonomous UAV System Vision-based Navigation IOT River Inspection Building Inspection Coverage Area Scan Package Delivery UAV Applications Spatial Positioning | ||
- archsoong@gmail.com
other people also saw








