



| Technical Name | Autonomous UAV River Inspection with Satellite Imagery Integration System | ||
|---|---|---|---|
| Project Operator | National Chengchi University | ||
| Project Host | 劉吉軒 | ||
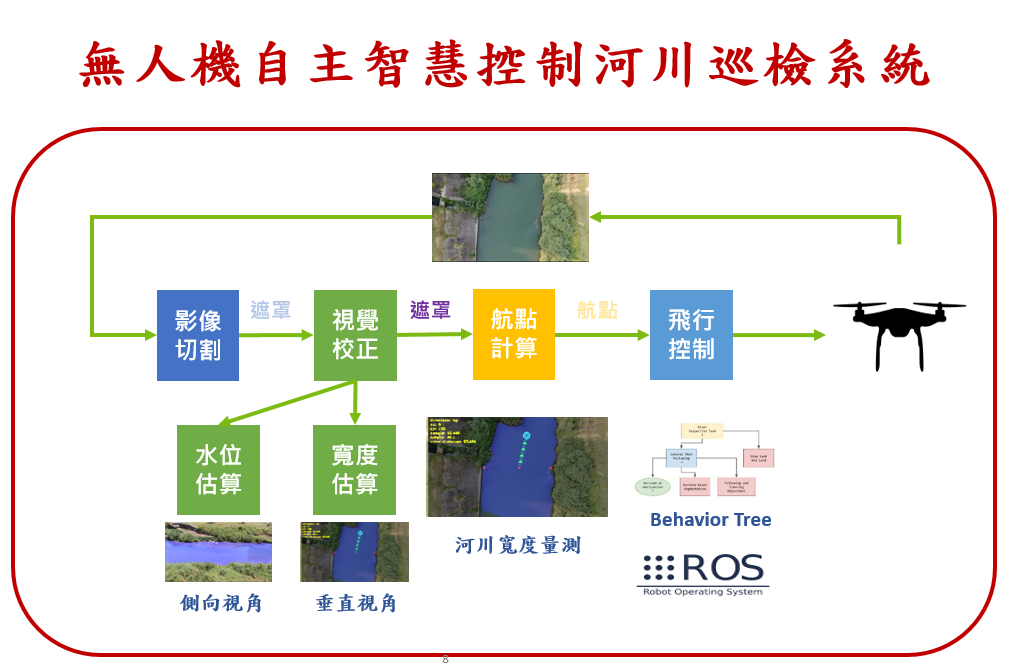
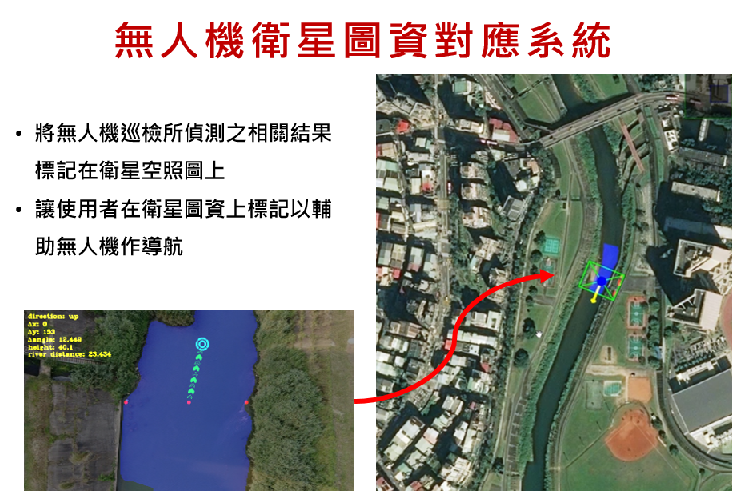
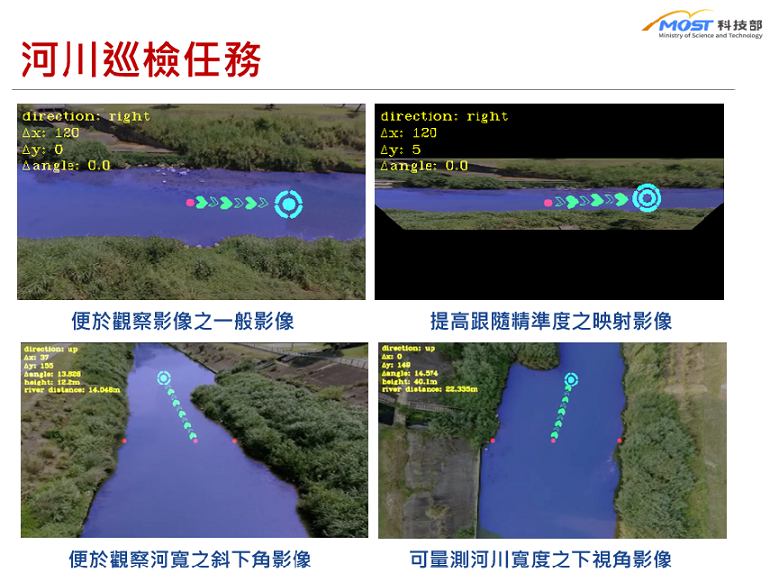
| Summary | With The Autonomous UAV River Inspection System, river inspection personnel only need to set up and initiate the UAV inspection program, the UAV will then take-off to execute and complete its pre-determine task independently. The UAV will fly along the river through our vision-based navigation algorithm, it will detect, record, measure and mark specified objects according to task requirements, and update the relevant information to the satellite aerial imagery interface through GPS and space positioning algorithm. The river management personnel can have a more comprehensive understanding of the current status of rivers, which supports river management in providing additional and instant information for decision making. |
||
| Scientific Breakthrough | Our system integrates different technical modules through a decision model and conducts field tests in the real-world to match specific application needs. Under real-world constraints such as wind and electromagnetic field, our tests show that the UAV can follow the river autonomously through tightly coupled visual perception and flight control mechanisms. To enhance the real-time performance of UAV, onboard-computing, and lightweight visual models are developed to improve overall responsiveness. To better locate detected objects, space measurement, and 3D localization techniques, with the assistance of GPS and satellite aerial images, are integrated to better position the object location. |
||
| Industrial Applicability | This technology can effectively enhance data collection to provide a more comprehensive perspective for river management personnel to support resource management. It can support regular river information updates at a relatively low cost. This technology is not only effective in river management but also can provide new solutions for different industries. Through images provided by UAVs, it can provide decision-making information in different situations, such as pre-exploration of disaster sites, locate casualties of disaster sites, high-speed rail tracks inspection and etc. |
||
| Keyword | Unmanned Aerial Vehicle River Inspection Internet of Things Artificial Intelligence Onboard Computing Vision-Based Navigation Vision-Based Measurement Space Localization Autonomous Control Architecture Real-Time Computing | ||
- archsoong@gmail.com
other people also saw