



| Technical Name | Autonomous Underwater Vehicle With Object Recognition and Auto-Navigation Using Artificial Intelligence | ||
|---|---|---|---|
| Project Operator | National Sun Yat-Sen University | ||
| Project Host | 王朝欽 | ||
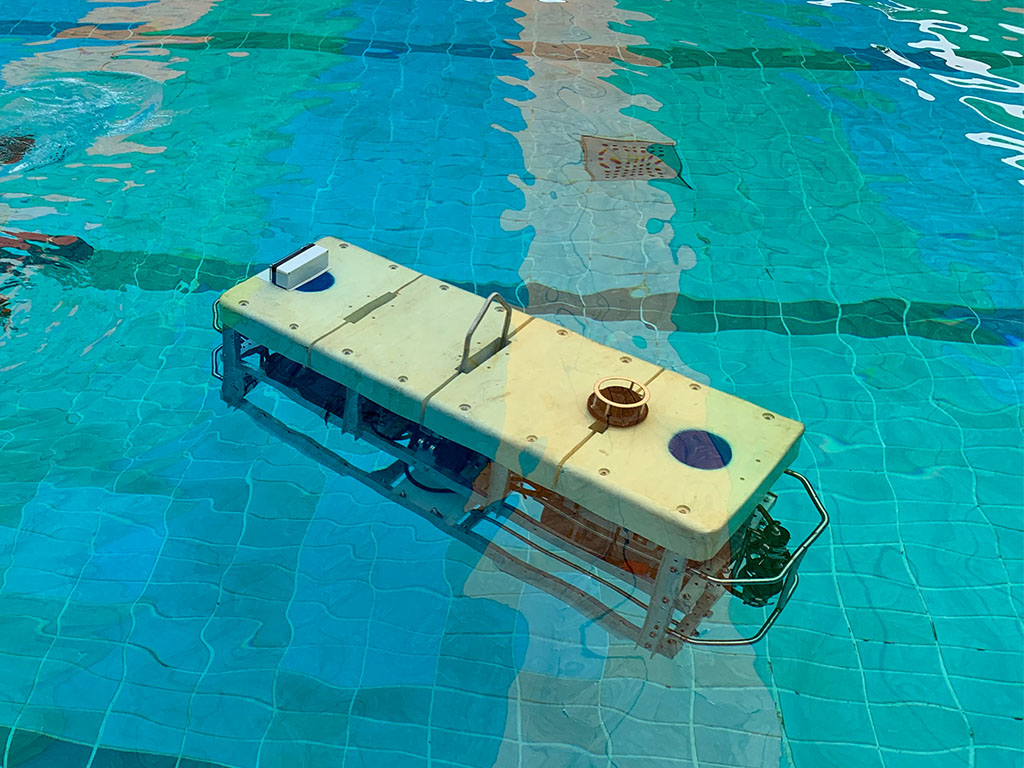
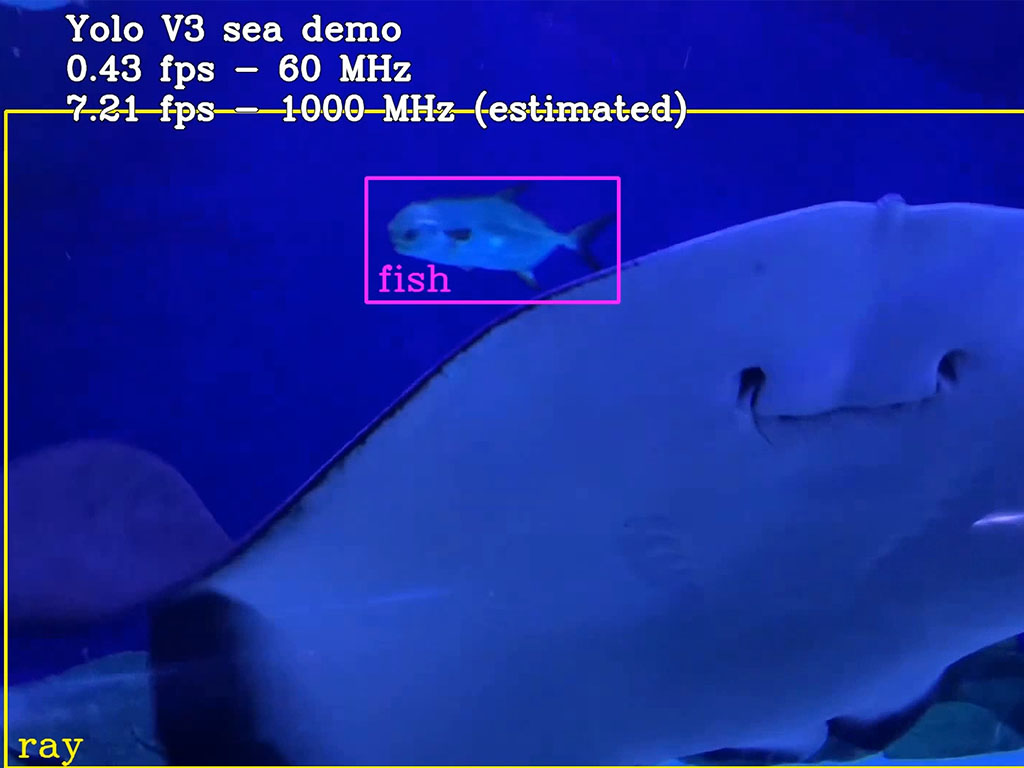
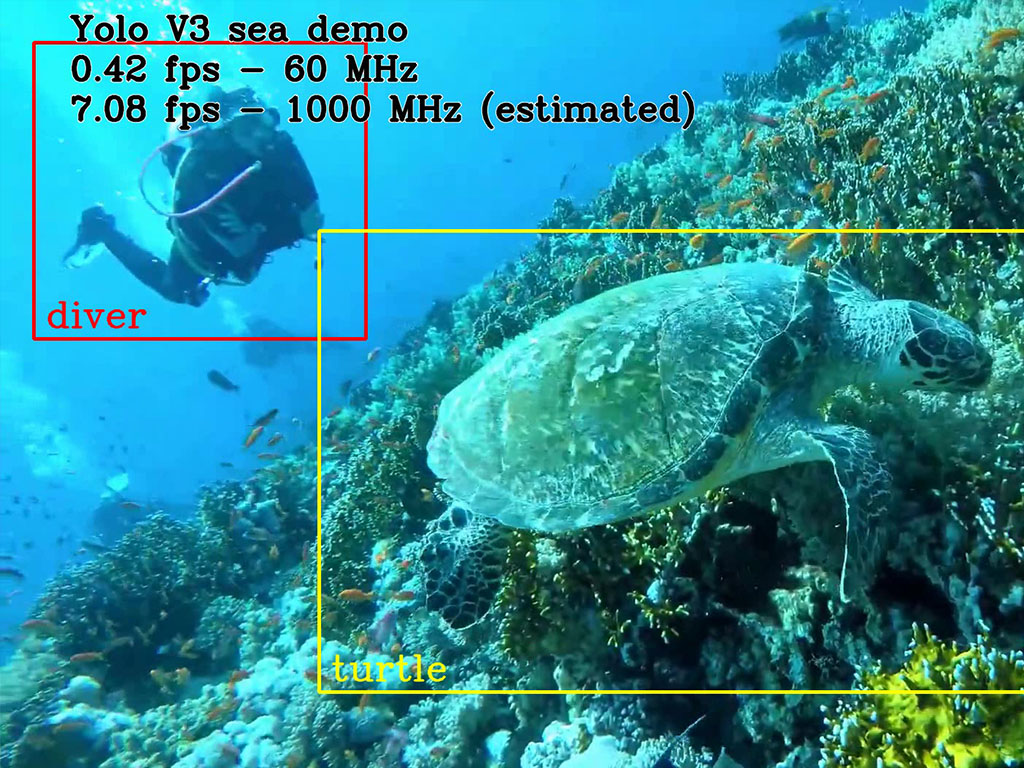
| Summary | Unmanned autonomous underwater vehicles (AUV) is developed to carry out underwater investigation, environmental exploration, biological recording, etc. AI technologies are integrated to achieve accurate object detection and positioning. Modified Inception module is used in object detection network enhanced by parallelized multi-dimensional feature extraction algorithm to optimally reduce the network size without sacrificing too much accuracy. Underwater object image augmentation method by 3-D modeling is developed to enlarge underwater object databank. Our methods can reach 10fps and 83.645% accuracy on 24GFLOPS RPi3 for deep-sea unmanned AUVs. |
||
| Scientific Breakthrough | The major breakthrough of this project is aimed at embedding AI technologies in unmanned AUVs for deep sea operations. All of major KPI comparisons with international benchmark (IBK) are listed as follows. |
||
| Industrial Applicability | This project is aimed at embedding AI technologies in unmanned AUVs for deep sea operations. The potential application areas are as follows. |
||
| Keyword | unmanned vehicle autonomous underwater vehicle (AUV) artificial intelligence (AI) 3D modeling underwater image enhancement and defogging underwater positioning underwater navigation underwater object recognition and tracking BMS monitoring high-efficiency power conversion | ||
- jia_yi_huang@g-mail.nsysu.edu.tw
other people also saw