



| Technical Name | Device and method for a piggyback intravenous drip frame with balance control | ||
|---|---|---|---|
| Project Operator | National Chung Hsing University | ||
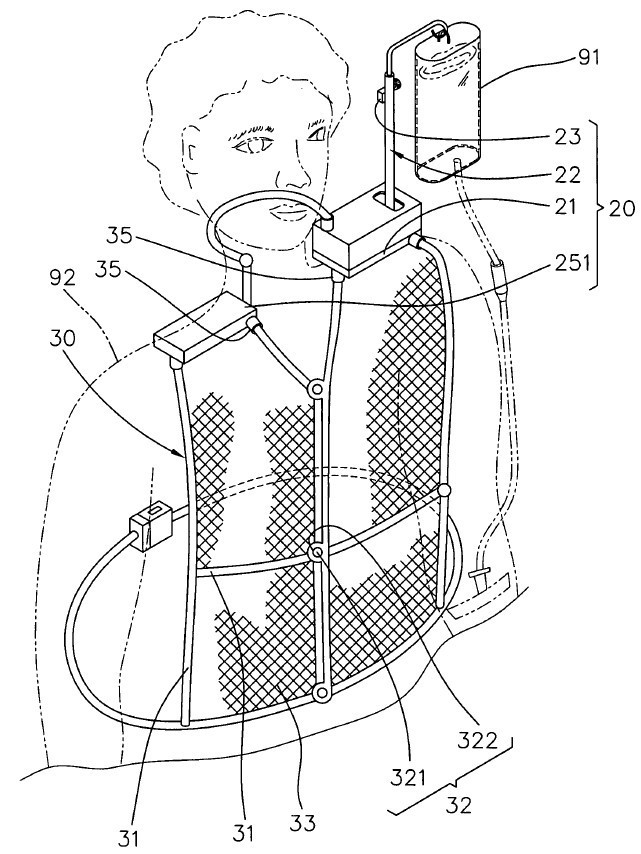
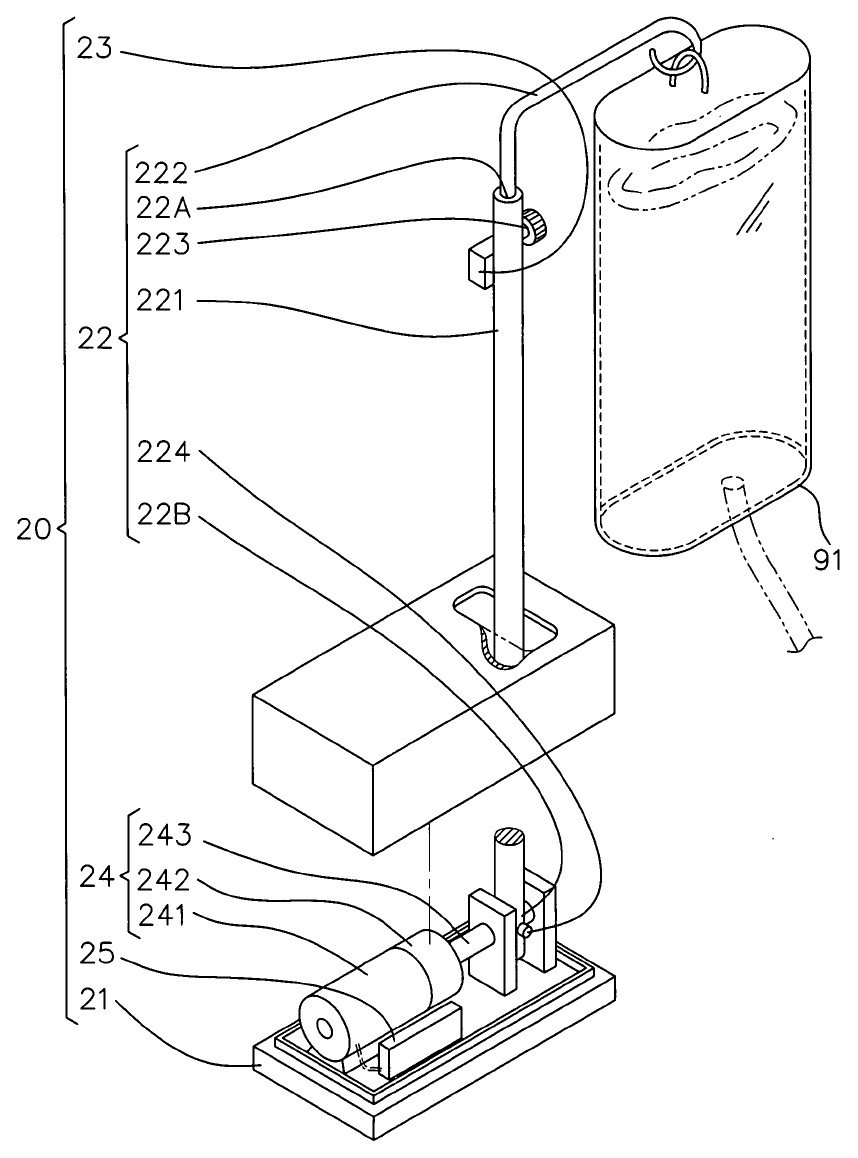
| Summary | Due to the inconvenience of the conventional intravenous drip frame, the piggyback intravenous drip frame is developed to ensure better mobility of the patient. However, the current design of the piggyback intravenous drip frame leads to a lack of balance control and increment of blood returning. To this end, this invention applies fuzzy control techniques and an inverted-pendulum system to build up a reliable system, which can facilitate patient mobility and ensure patient safety with compensating the inclination angle of the piggyback intravenous drip frame based on the motion information of the patient. Therefore, the reduction of blood returning and the balance control of the piggyback intravenous drip frame can be achieved. |
||
| Scientific Breakthrough | 1、與既有技術之比較 |
||
| Industrial Applicability | 達到讓病患方便移動及平衡控制點滴架的功效。 |
||
other people also saw