



| 技術名稱 | 服務型機器人之研製及其視覺物件姿態估測與抓取點學習 | ||
|---|---|---|---|
| 計畫單位 | 國立成功大學 | ||
| 計畫主持人 | 李祖聖 | ||
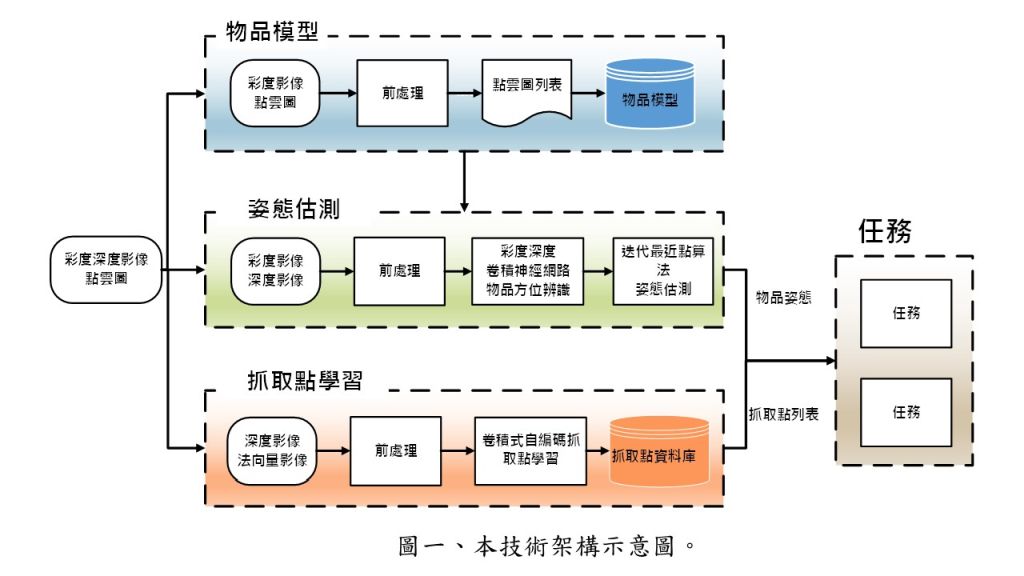
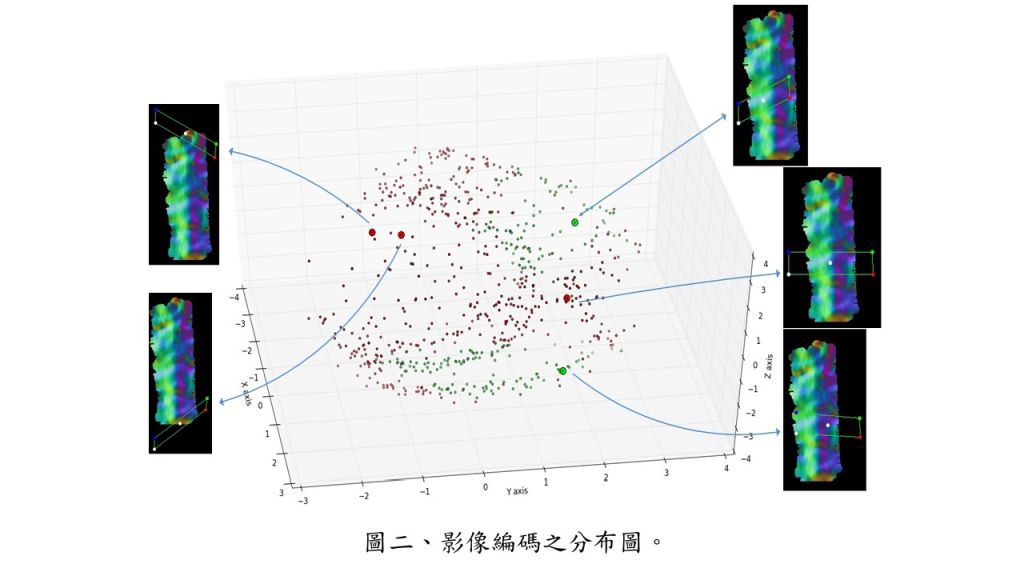
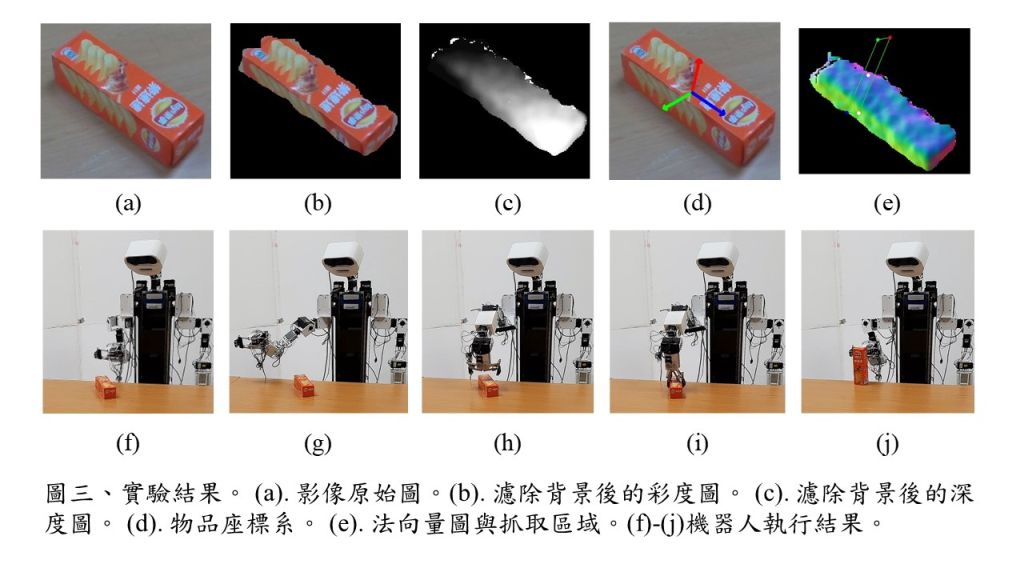
| 技術簡介 | 本技術係研製一台展新服務型機器人具備四輪獨立驅動與旋轉之全方位移動功能及雙7軸手臂。為提升操作物品的複雜度,機器人建立物品座標系以因應不同的任務採用不同的抓取點。物品姿態估測係利用視覺卷積神經網路及迭代最近點法完成。物品抓取點則透過卷積自動編碼器學習進行學習及影像編碼,依照任務挑選合適的抓取點。 |
||
| 科學突破性 | 本技術最大的特色在於同時將物件姿態估測、抓取點,以及任務目標三個項目一起進行考量,將單項的功能整合成一系列的步驟,利用物體座標系,建立物品間及與機器人間的相對坐標系,並透過物品法向量圖進行抓取點的學習,讓機器人可以針對不同的任務,彈性得選用夾取點與夾爪姿態。 |
||
| 產業應用性 | 本技術基於現有視覺辨識技術,建立物件模型與座標系,估測物件姿態,並提出抓取點學習網路,提供多元化的抓取點,以搭配任務選取。本技術之產業應用性如下: (1) 可應用於各種服務型機器人,提高機器人對物品的操作複雜度,以完成更複雜的任務。(2) 亦可應用具有深度視覺攝影機之機械手臂當中,減少整料的流程,提高設備稼動率。 |
||
| 關鍵字 | 服務型機器人研製 機械手臂 物件姿態估測 抓取點學習 物品模型與座標系 深度影像卷積神經網路 最近點迭代法 卷積自編碼器 物件辨識 物件抓取 | ||
- 聯絡人
- 謝文怡
- 電子信箱
- wenyi@mail.ncku.edu.tw
其他人也看了