



| 技術名稱 | 自驅動、完美柔性、主動式機器人皮膚與有感覺皮膚的軟性機器人 | ||
|---|---|---|---|
| 計畫單位 | 國立中興大學 | ||
| 計畫主持人 | 賴盈至 | ||
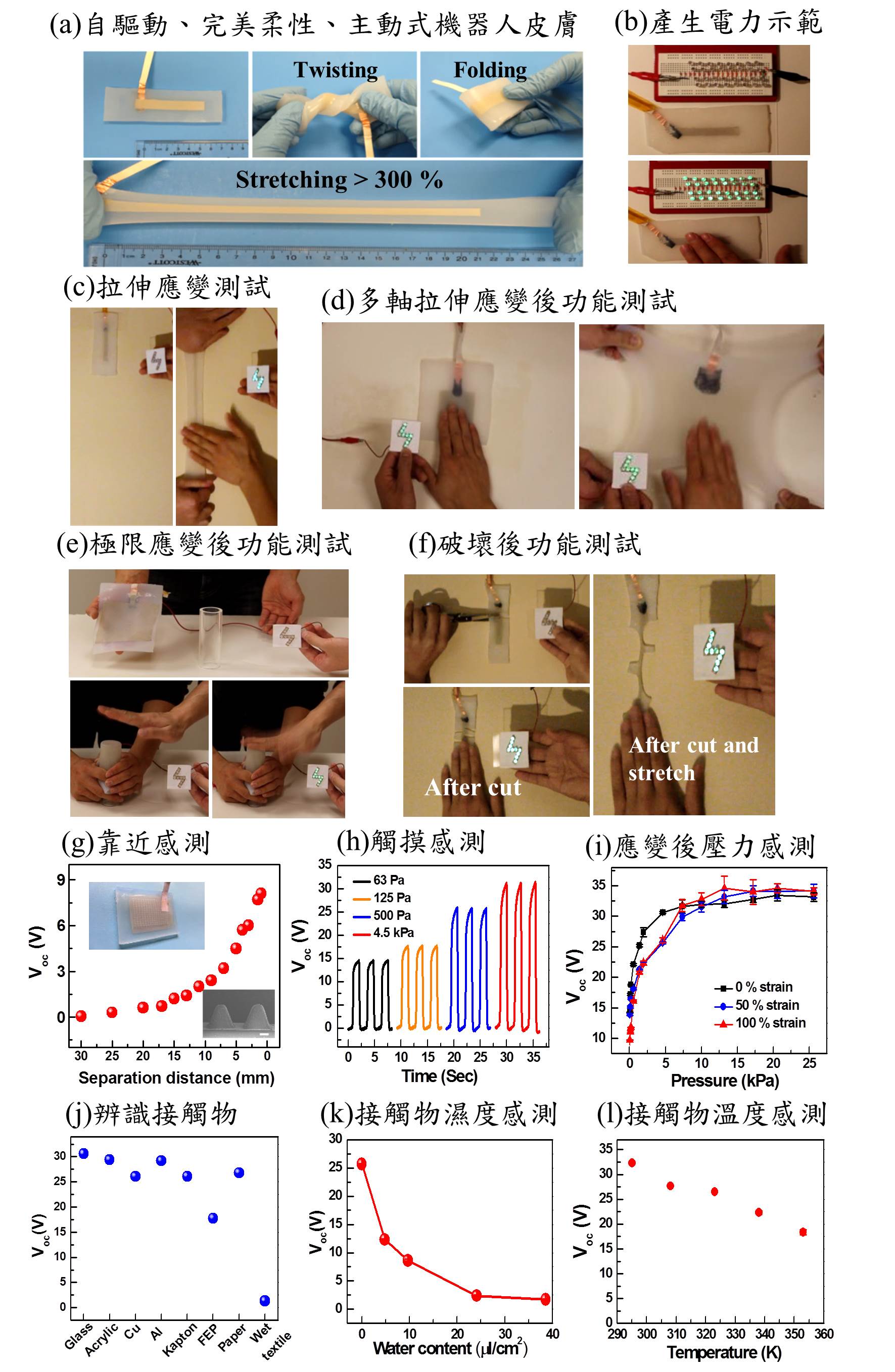
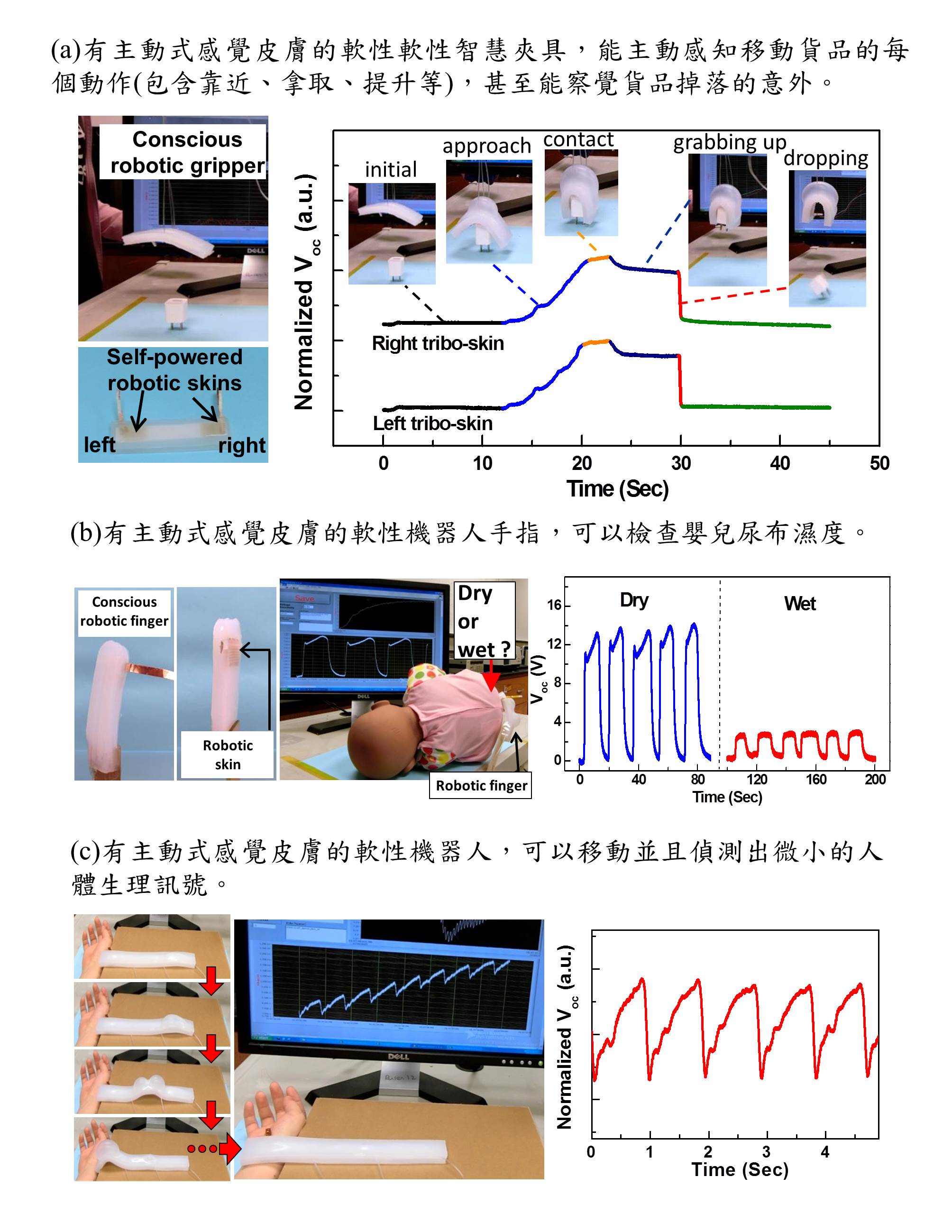
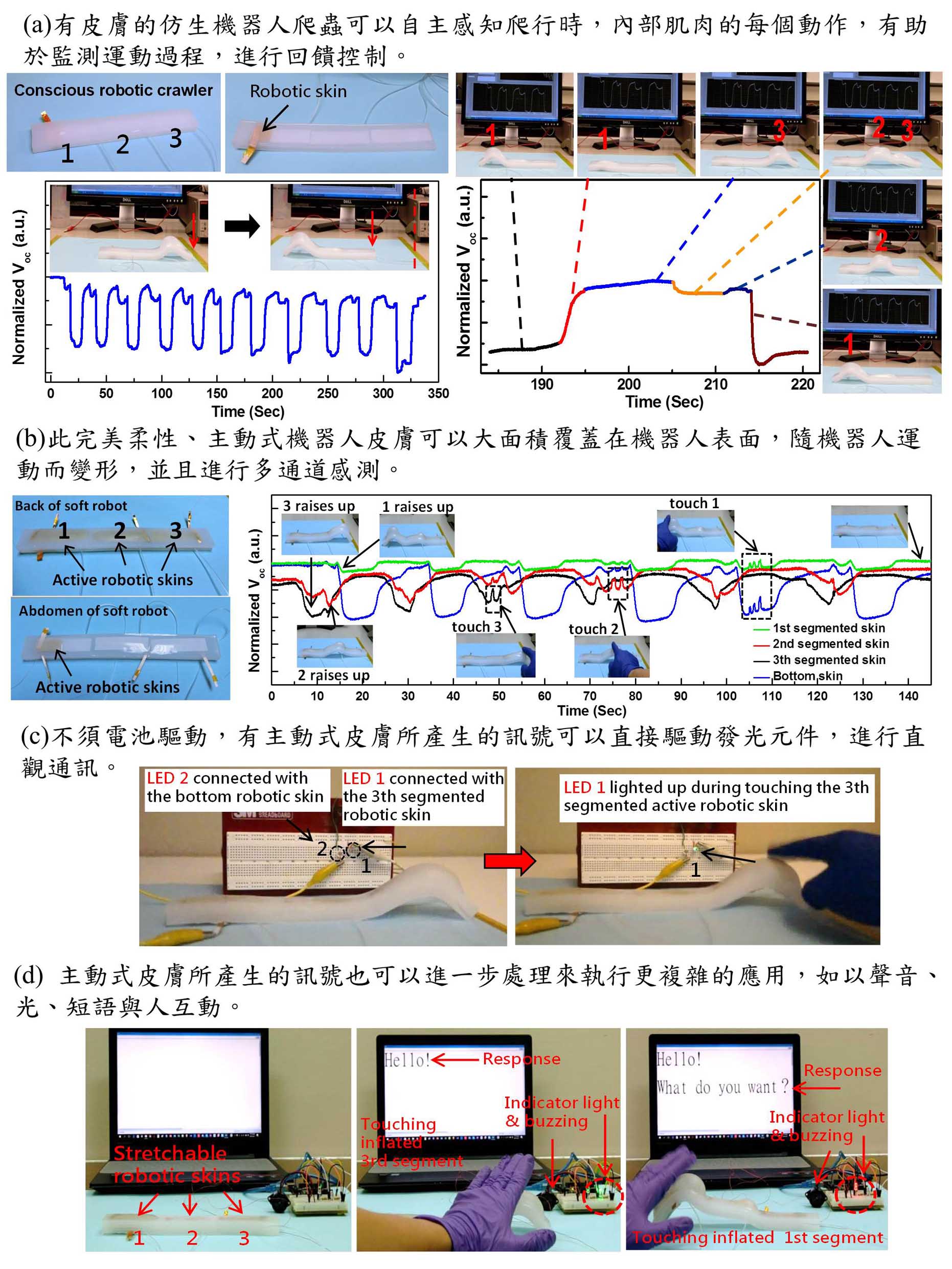
| 技術簡介 | 以人體皮膚和軟性生物為靈感,破壞式創新智慧機器人科技,成果含兩部分:1.不需要電力驅動、可隨意變形、完美柔性的主動式機器人皮膚,利用大自然靜電能感測靠近、觸摸、壓力、濕度、溫度、接觸材料等。2.各種功能的有感覺軟性機器人,包含:可感知靠近、抓取、提升、甚至察覺貨品脫落的夾具、感測人體生理訊號、嬰兒尿布濕度、自身肌肉動作、直觀通信、人機互動等功能。 |
||
| 科學突破性 | 目前無法實現機器觸覺,因為1傳統元件無法隨機器人軀體配置、無法隨其運動而變形2被動感測器需要連續供給電/光訊號驅動,電力是大面積配置一大問題。此外,軟性機械有極大潛力,但連續柔軟、可變的軀體,使實現其皮膚更是困難。破壞式突破瓶頸:1利用自然靜電,搭配材料開發,實現第一個不須電力驅動、完美柔性、可大面 |
||
| 產業應用性 | 智慧機器人將全面影響工業、服務、醫療、照護等,目前挑戰包含:缺乏環境感知、不安全人機應用、缺乏自由度等。沒有皮膚,無法感知內、外,難以回饋控制,更增添危險性。1所開發皮膚適用各種需要感測網絡的應用,含機械安全皮膚、感知皮膚、人機介面等。2有感覺軟機器人提供更大自由度、更安全,能執行精緻、有感的工作。 |
||
| 關鍵字 | __ | ||
- 聯絡人
- 賴盈至
- 電子信箱
- futuretech.most@gmail.com








