



| Technical Name | 3D room layoutcamera pose estimation from 2D images | ||
|---|---|---|---|
| Project Operator | National Tsing Hua University | ||
| Project Host | 賴尚宏 | ||
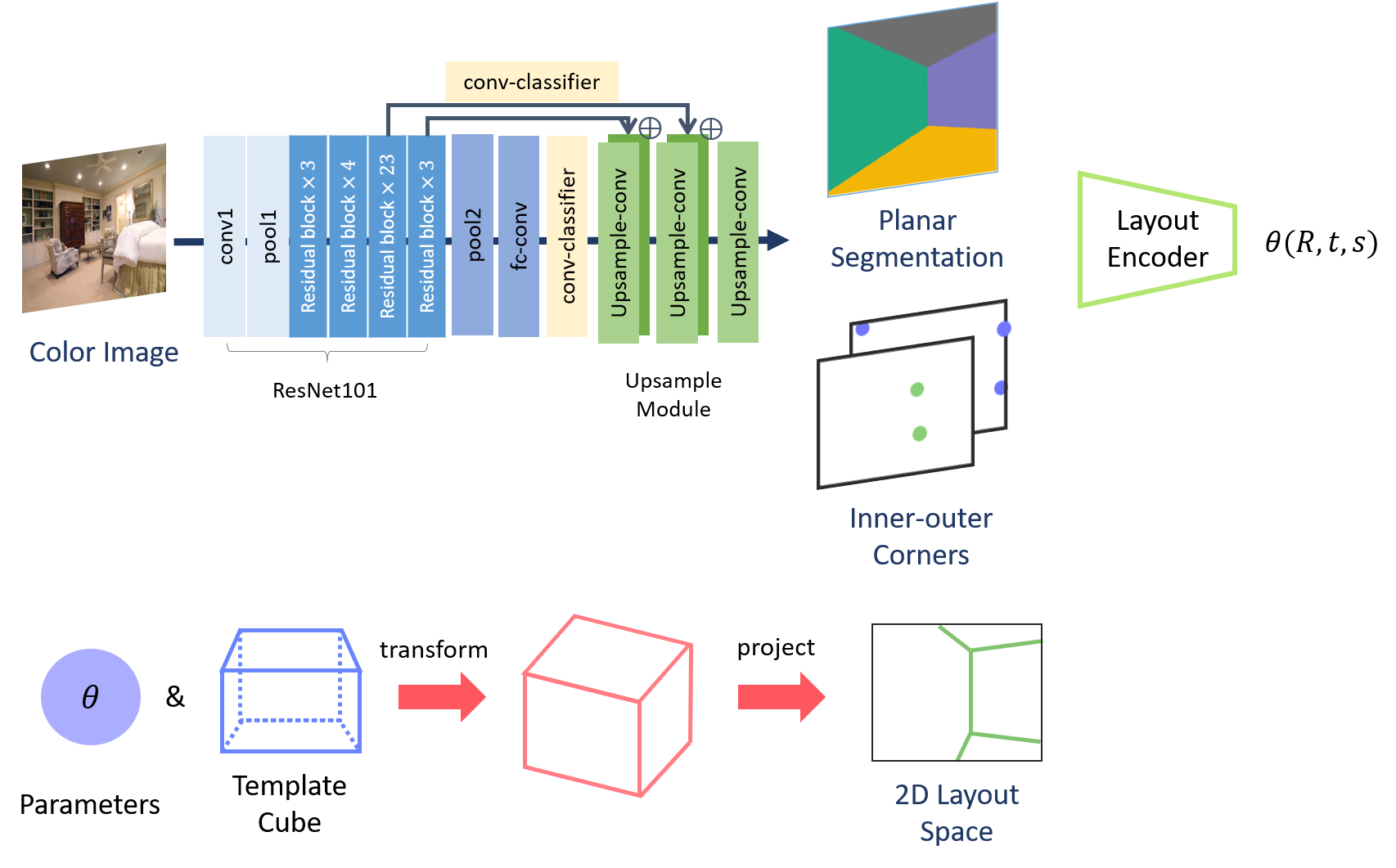
| Summary | We propose a geometry-aware framework with deep networks to estimate the indoor room layout in the 2D as well as 3D space. We decouple the task of 3D layout estimation into two stages, first estimating the room layout in the 2D spacethen estimating the 3D cuboid model parameters, all done with deep learning. Our experiment shows that the proposed model can provide not only competitive 2D layout estimation but also 3D room layout estimation in real-time. |
||
| Scientific Breakthrough | This technology is based on estimating 3D indoor geometric layout from a 2D image. Our method employs deep learning to estimate 2D3D indoor layout. We decouple the 3D layout estimation into two stages, first estimating the 2D room layoutthen estimating the 3D layout cuboid model parameters. The proposed two-stage architecture for 3D room layout estimation is novel. It can be applied to 3 |
||
| Industrial Applicability | This technology can be applied to applications that require real-time 3D reconstructionpositioning from 2D indoor images. For example, it can be applied to the indoor robot navigation, that builds a model of the 3D scene from the 2D indoor images to achieve the 3D positioning of the robot. It can also be applied to augmented realityvirtual reality applications, since they require instant |
||
| Keyword | __ | ||
- futuretech.most@gmail.com
other people also saw